GPS Is Becoming A Target
Drones increasingly operate in environments where GPS cannot be treated as guaranteed. The Breaking Defense source text, presented by Vantor, describes how jamming and spoofing tools are becoming cheaper, more accessible, and easier to deploy. For uncrewed aircraft, that creates a direct mission problem: without reliable positioning, drones can drift off course, fail to complete tasks, or become easier to intercept.
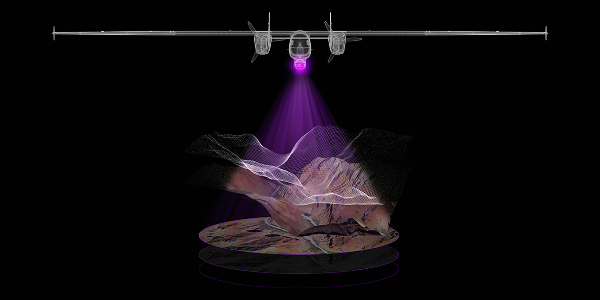
The proposed answer is 3D vision-based navigation. Instead of relying solely on satellite signals, a drone uses onboard cameras and high-resolution map data to compare what it sees in real time with a known representation of the terrain. If the match is accurate, the drone can continue navigating even when GPS is denied or degraded.
Absolute Positioning Versus Dead Reckoning
The source emphasizes the importance of absolute positioning: knowing exactly where a drone is at a given moment. GPS provides that directly when available. Without it, many systems fall back on relative positioning, estimating movement from the last known location using onboard measurements. That approach can degrade quickly because small errors compound over time.
Paul Millhouse, identified in the source as senior director of Raptor products at Vantor, describes the problem this way: once GPS is gone, the system may know where it was, but not precisely where it is. That uncertainty grows with distance and time. For military, logistics, and reconnaissance missions, compounding location error can be the difference between success and failure.

Why 3D Terrain Matters
Vision-based navigation depends on reference data. A drone needs a reliable model of the surrounding terrain so it can match live camera input to the map. The source describes Vantor’s Raptor solution as using decades of global mapping to provide a 3D reference layer for real-time positioning.
The 3D aspect is important because low-flying uncrewed aircraft do not experience the world as flat imagery. Terrain shape, elevation, structures, ridgelines, and other features can all help a system localize itself. Kara Kramer, identified as head of sales for Raptor, says the system is understanding terrain rather than interpreting a flat 2D image.
Counter-Drone Pressure Is Rising
The navigation challenge is part of a broader contest between drones and counter-drone systems. As drones become cheaper and more widely used, adversaries have more incentive to attack their guidance systems. The source notes that a single jammer or spoofer can disrupt navigation across an area, potentially affecting systems that depend on clean satellite signals.
This is especially relevant in contested military settings, but it also applies to remote and infrastructure-poor environments where GPS coverage may be inconsistent or vulnerable. The source calls this the tyranny of distance: operating over long ranges without reliable positioning.

Commercial And Military Overlap
The article is framed around defense use cases, but the underlying problem is broader. Logistics drones, inspection aircraft, disaster-response systems, and autonomous platforms all need resilient positioning. Any mission that sends an uncrewed system into a place unsafe or impractical for humans becomes more fragile if navigation depends on a single external signal.
3D vision-based navigation does not necessarily replace GPS. A more realistic architecture uses GPS when it is available and cross-checks or substitutes with vision when it is not. That layered approach is common in autonomy: multiple sensors and reference systems reduce reliance on any one input.
Limits And Open Questions
The source is sponsored and centers on Vantor’s Raptor product, so its claims should be read as describing a company-backed approach rather than an independent comparative test. The supplied text does not provide benchmark data, field trial results, error rates, compute requirements, or performance under weather and visibility constraints.
Those missing details matter. Camera-based navigation can be affected by darkness, smoke, snow, featureless terrain, map freshness, sensor quality, and onboard processing limits. High-resolution 3D maps must also be maintained and made available for areas where drones operate. The strength of the concept depends on how well those practical constraints are handled.
The Direction Of Travel
Even with those caveats, the strategic shift is clear. As GPS interference becomes easier to deploy, autonomy systems need positioning methods that remain useful in dirty radio-frequency environments. 3D vision-based navigation is one of the more concrete paths because it uses the physical world itself as the reference.
For drones operating close to the ground, terrain is not background. It is a navigational signal. The more accurately systems can read that signal, the less dependent they become on satellites that adversaries can jam or spoof.
This article is based on reporting by Breaking Defense. Read the original article.
Originally published on breakingdefense.com




