GPS लक्ष्य बनत आहे
ड्रोन आता अशा वातावरणात काम करत आहेत जिथे GPS गृहित धरता येत नाही. Breaking Defense च्या स्रोत मजकुरात, जो Vantor ने सादर केला आहे, जॅमिंग आणि स्पूफिंग साधने स्वस्त, अधिक उपलब्ध, आणि तैनात करणे सोपे होत असल्याचे वर्णन आहे. मानवरहित विमानांसाठी, ही थेट मिशन समस्या आहे: विश्वासार्ह स्थितीशिवाय ड्रोन मार्ग चुकू शकतात, काम पूर्ण करू शकत नाहीत, किंवा त्यांना अडवणे सोपे होऊ शकते.
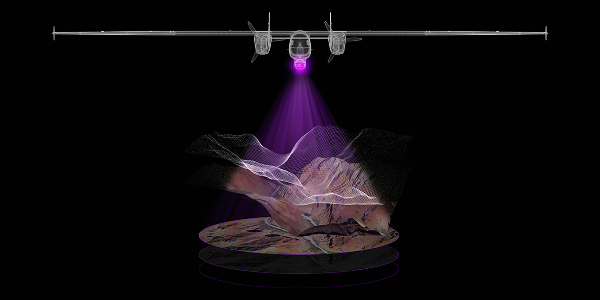
प्रस्तावित उत्तर 3D vision-based navigation आहे. केवळ उपग्रह सिग्नलवर अवलंबून न राहता, ड्रोन आपल्या ऑनबोर्ड कॅमेर्यांचा आणि उच्च-रिझोल्यूशन नकाशा डेटाचा वापर करून प्रत्यक्षात जे पाहते ते भूभागाच्या ज्ञात प्रतिनिधित्वाशी तुलना करतो. जुळणी अचूक असेल तर GPS नाकारले गेले किंवा कमजोर झाले तरी ड्रोन नेव्हिगेशन सुरू ठेवू शकतो.
Absolute Positioning विरुद्ध Dead Reckoning
स्रोत absolute positioning चे महत्त्व अधोरेखित करतो: एका विशिष्ट क्षणी ड्रोन नेमका कुठे आहे हे जाणणे. GPS उपलब्ध असल्यास ते थेट देते. त्याशिवाय, अनेक प्रणाली relative positioning कडे वळतात, जिथे शेवटच्या ज्ञात स्थानापासून ऑनबोर्ड मापनांच्या आधारे हालचालीचा अंदाज घेतला जातो. लहान चुका कालांतराने साचत गेल्याने ही पद्धत लवकरच कमजोर होऊ शकते.
स्रोतामध्ये Vantor च्या Raptor products चे senior director म्हणून ओळखले गेलेले Paul Millhouse ही समस्या अशी मांडतात: GPS गेल्यावर प्रणालीला आपण कुठे होतो हे कळू शकते, पण सध्या नेमके कुठे आहोत हे माहीत नसते. अंतर आणि वेळ वाढत गेल्यावर ही अनिश्चितता वाढते. सैन्य, लॉजिस्टिक्स, आणि reconnaissance मोहिमांसाठी, अशी साचणारी स्थानिक त्रुटी यश आणि अपयश यातील फरक ठरू शकते.

3D भूभाग का महत्त्वाचा आहे
Vision-based navigation संदर्भ डेटावर अवलंबून असते. ड्रोनला आसपासच्या भूभागाचा विश्वासार्ह मॉडेल हवा असतो, जेणेकरून तो लाइव्ह camera input नकाशाशी जुळवू शकेल. स्रोत Vantor च्या Raptor solution ला दशकानुदशकांच्या global mapping चा वापर करून real-time positioning साठी 3D reference layer देणारे म्हणून वर्णन करतो.
3D पैलू महत्त्वाचा आहे, कारण कमी उंचीवर उडणारी मानवरहित विमाने जगाकडे सपाट प्रतिमेसारखे पाहत नाहीत. भूभागाची रचना, उंची, बांधकामे, ridgelines, आणि इतर वैशिष्ट्ये प्रणालीला स्वतःचे स्थान ठरवायला मदत करतात. Raptor च्या sales head Kara Kramer म्हणतात की प्रणाली सपाट 2D image समजून घेण्यापेक्षा भूभाग समजून घेत आहे.
Counter-drone दबाव वाढत आहे
नेव्हिगेशन आव्हान हे ड्रोन आणि counter-drone प्रणालींमधील व्यापक संघर्षाचा भाग आहे. ड्रोन स्वस्त आणि अधिक व्यापक होत असताना, विरोधकांना त्यांच्या guidance systems वर हल्ला करण्याची अधिक प्रेरणा मिळते. एक jammer किंवा spoofer एका क्षेत्रातच नेव्हिगेशन बिघडवू शकतो, ज्यामुळे स्वच्छ उपग्रह सिग्नलवर अवलंबून असलेली प्रणाली प्रभावित होऊ शकते.
हे विशेषतः contested military परिस्थितीत लागू होते, पण GPS coverage असंगत किंवा कमजोर असलेल्या दूरस्थ आणि infrastructure-poor वातावरणांनाही लागू होते. स्रोत याला tyranny of distance म्हणतो: विश्वासार्ह स्थितीशिवाय लांब अंतरावर कार्य करणे.
व्यावसायिक आणि लष्करी ओव्हरलॅप
लेख संरक्षण वापराच्या संदर्भात लिहिलेला असला तरी मूळ समस्या व्यापक आहे. logistics drones, inspection aircraft, disaster-response systems, आणि autonomous platforms यांना मजबूत positioning आवश्यक आहे. ज्या कोणत्याही मोहिमेत मानवरहित प्रणालीला अशा ठिकाणी पाठवले जाते जिथे माणसांना जाणे धोकादायक किंवा अव्यवहार्य आहे, ती navigation एका बाह्य सिग्नलवर अवलंबून असेल तर अधिक नाजूक होते.
3D vision-based navigation नेहमी GPS ची जागा घेईलच असे नाही. अधिक वास्तववादी रचना GPS उपलब्ध असेल तेव्हा ते वापरते आणि उपलब्ध नसेल तेव्हा vision ने cross-check किंवा substitute करते. autonomy मध्ये असा layered approach सामान्य आहे: अनेक sensors आणि reference systems कोणत्याही एका input वरची अवलंबित्व कमी करतात.
मर्यादा आणि उघडे प्रश्न
स्रोत हा sponsored piece आहे आणि Vantor च्या Raptor product भोवती केंद्रित आहे, त्यामुळे त्याचे दावे स्वतंत्र comparative test म्हणून नव्हे तर कंपनी-समर्थित दृष्टिकोन म्हणून वाचले पाहिजेत. दिलेल्या मजकुरात benchmark data, field trial निकाल, error rates, compute requirements, किंवा हवामान आणि दृश्यमानता मर्यादांखालील कामगिरीबद्दल माहिती नाही.
हे हरवलेले तपशील महत्त्वाचे आहेत. Camera-based navigation अंधार, धूर, बर्फ, featureless terrain, map freshness, sensor quality, आणि onboard processing limits यांमुळे प्रभावित होऊ शकते. उच्च-रिझोल्यूशन 3D maps देखील ड्रोन जिथे काम करतात त्या भागांसाठी सतत राखावे आणि उपलब्ध करून द्यावे लागतात. संकल्पनेची ताकद या व्यावहारिक मर्यादा किती चांगल्या प्रकारे हाताळल्या जातात यावर अवलंबून आहे.

पुढची दिशा
या सावधानतांनंतरही, धोरणात्मक बदल स्पष्ट आहे. GPS interference तैनात करणे अधिक सोपे होत असताना, autonomy systems ना अशा positioning पद्धतींची गरज आहे ज्या गोंधळलेल्या radio-frequency वातावरणातही उपयुक्त राहतात. 3D vision-based navigation हा सर्वात ठोस मार्गांपैकी एक आहे, कारण तो भौतिक जगालाच reference म्हणून वापरतो.
जमिनीच्या अगदी जवळ उडणाऱ्या ड्रोनसाठी, भूभाग हा background नाही. तो एक navigational signal आहे. प्रणाली तो signal जितक्या अचूकपणे वाचतील, तितक्या कमी त्या अशा उपग्रहांवर अवलंबून राहतील ज्यांना विरोधक jam किंवा spoof करू शकतात.
हा लेख Breaking Defense च्या रिपोर्टिंगवर आधारित आहे. मूळ लेख वाचा.
Originally published on breakingdefense.com