रोबोटिक्स कंपन्या कच्च्या व्हिजनपलीकडे जाऊन अधिक खोल अवकाशीय समजुतीकडे पाहत आहेत
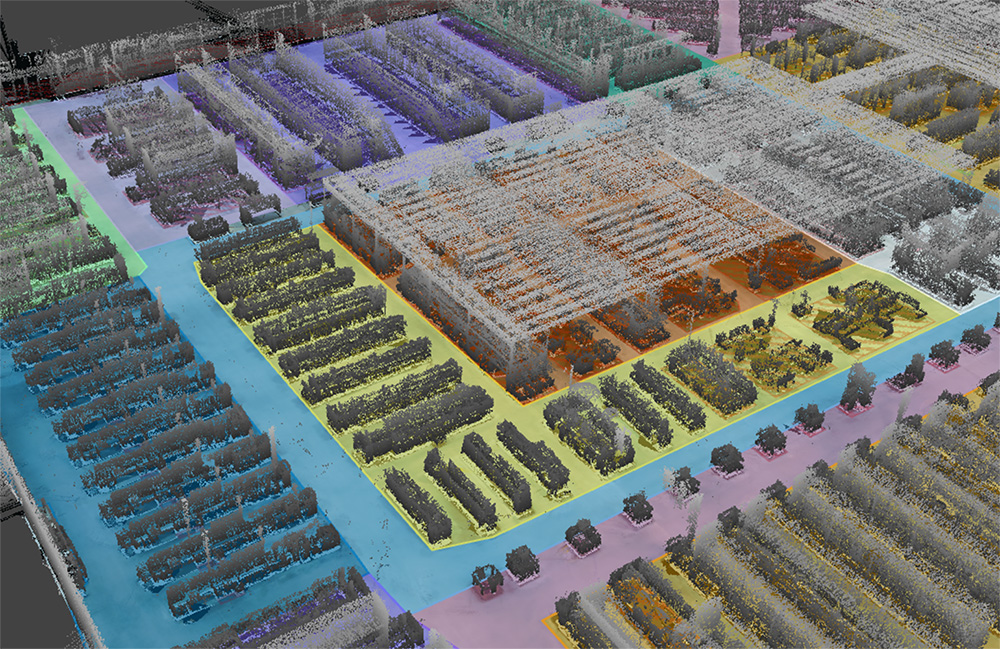
Brain Corp आणि University of California, San Diego जटिल वातावरणे स्वायत्त रोबोट कशी समजतात हे सुधारण्यासाठी त्यांच्या संशोधन सहकार्याचा विस्तार करत आहेत. हे काम सेमॅंटिक मॅपिंग आणि भागीदार “contextual grounding layer” असे ज्याचे वर्णन करतात त्यावर केंद्रित आहे; हे भौतिक जागांचे एक डिजिटल प्रतिनिधित्व आहे, जे व्यापारी आणि औद्योगिक सेटिंग्जमध्ये रोबोटांना आजूबाजूचे वातावरण अधिक विश्वासार्हपणे समजून घेण्यास मदत करण्यासाठी तयार केले आहे.
व्हिजन-लँग्वेज-ऍक्शन आणि इतर जनरेटिव्ह एआय प्रणाली प्रत्यक्ष यंत्रांमध्ये समाविष्ट करण्यासाठी रोबोटिक्स विकसक स्पर्धा करत असताना ही घोषणा आली आहे. या मॉडेल्सनी प्रतिमा आणि भाषेतून रोबोट काय अनुमान काढू शकतात याची व्याप्ती वाढवली आहे, पण मुख्य प्रश्न असा आहे की व्यस्त, अनिश्चित वातावरणात तैनात करण्यासाठी त्यांच्याकडे पुरेशी सुसंगतता आणि लवचिकता आहे का.
Brain Corp आणि UC San Diego यांना मॅप्स अजूनही का महत्त्वाचे वाटतात
पुरवलेल्या स्रोतांनुसार, हे सहकार्य असे मानते की उद्योग दृश्य डेटावरून अधिक थेट चालणाऱ्या एआय प्रणालींचा शोध घेत असला तरी संदर्भात्मक 3D सेमॅंटिक मॅप्स अजूनही अत्यावश्यक आहेत. दुसऱ्या शब्दांत, अधिक समृद्ध संवेदना संरचित अवकाशीय समजुतीची गरज संपवत नाही. कदाचित ती गरज अधिकच तातडीची बनवते.
एंड-टू-एंड एआयबद्दल वाढत्या उत्साहाच्या क्षेत्रात ही एक महत्त्वाची भूमिका आहे. जर हे भागीदारी योग्य असेल, तर व्यावहारिक स्वायत्ततेचा मार्ग केवळ मोठ्या मॉडेल्सवर नाही, तर यंत्रांना वस्तू काय आहेत, त्या कुठे आहेत, आणि रोबोट ज्या कामासाठी प्रयत्न करीत आहे त्यांच्याशी त्यांचा काय संबंध आहे हे सांगणाऱ्या मजबूत विश्व मॉडेल्सवरही अवलंबून असेल.
SLAM पासून परिस्थितीजन्य जागरूकतेपर्यंत
Simultaneous localization and mapping, किंवा SLAM, ने रोबोटांना स्थिर औद्योगिक पेशींपासून गतिमान जागांमध्ये नेण्यात मदत केली, कारण ते नेव्हिगेशनदरम्यान नकाशे तयार आणि अद्ययावत करण्याची सुविधा देत होते. भागीदारांच्या मते पुढचे पाऊल म्हणजे त्या नकाशांना अधिक सेमॅंटिक आणि संदर्भात्मक खोली देणे. याचा अर्थ भूमितीपलीकडे जाऊन समजुतीकडे जाणे: फक्त एक कॉरिडॉर नव्हे, तर असा कॉरिडॉर ज्यात लोक, अडथळे, कार्यप्रवाह आणि बदलते ऑपरेशनल नियम आहेत.
स्रोत contextual grounding layer ला एक बुद्धिमान डिजिटल प्रतिनिधित्व असे वर्णन करते, जे रोबोट, ड्रोन आणि स्वयंचलित वाहने यांना सहाय्य करू शकते. याचा लाभ म्हणजे इतकी परिस्थितीजन्य जागरूकता की प्रगत एआय प्रणाली लोकांसह सामायिक भौतिक वातावरणांमध्ये सहज आणि सुरक्षितपणे प्रतिसाद देऊ शकतील.
संशोधनामागील व्यावसायिक समस्या
या दिशेचे आकर्षण व्यावहारिक आहे. अनेक रोबोटिक्स अपयशे असे होत नाहीत की एखादी प्रणाली प्रयोगशाळेत वस्तू ओळखू शकत नाही. ती घडतात कारण प्रत्यक्ष जागा गोंधळलेल्या, पुनर्रचनेस सक्षम आणि सामाजिकदृष्ट्या गुंतागुंतीच्या असतात. शेल्फ हलतात, गाड्या येतात, लोक प्रवाहात अडथळा आणतात, आणि प्रकाशस्थिती बदलते. प्रतिमा वर्गीकृत करू शकणारा पण ती माहिती कायमस्वरूपी अवकाशीय संदर्भात स्थिर करू न शकणारा रोबोट विश्वासार्ह करणे कठीण असते.
Brain Corp ची कार्यरत व्याप्ती या प्रकल्पाला प्रत्यक्ष तैनातीचा आधार देते. स्रोतामध्ये जागतिक स्तरावर 50,000 पेक्षा अधिक रोबोट तैनात असल्याचे नमूद आहे, म्हणजे कंपनी केवळ संशोधन प्रोटोटाइपवर काम करत नाही. हे महत्त्वाचे आहे, कारण यावरून हे सहकार्य फक्त शैक्षणिक बेंचमार्किंगसाठी नसून व्यावसायिकदृष्ट्या सुसंगत स्वायत्ततेसाठी आहे, असे सूचित होते.
भौतिक एआयसाठी मधला मार्ग
हे सहकार्य रोबोटिक्स धोरणातील व्यापक बदलही दर्शवते. उद्योग आता कठोर, कार्यविशिष्ट ऑटोमेशन आणि अतिशय महत्त्वाकांक्षी सर्वसाधारण-उद्देश एआय यांच्यामधील मधला मार्ग शोधत आहे. संदर्भात्मक मॅपिंग हा त्या मधल्या स्तरासाठी एक उमेदवार आहे. ते वर अधिक लवचिक वर्तनाची मुभा देतानाही रचना आणि सुरक्षितता टिकवून ठेवू शकते.
हा दृष्टिकोन मूलभूत ठरेल की नाही, हे अंमलबजावणीवर अवलंबून असेल, विशेषतः हे समृद्ध नकाशे किती चांगले प्रमाणात वाढतात, अद्ययावत होतात, आणि वेगाने विकसित होत असलेल्या एआय मॉडेल्सशी एकात्मिक होतात यावर. पण मूळ कल्पना योग्य आहे: रोबोटिक्समध्ये बुद्धिमत्ता म्हणजे फक्त पाहणे नाही. ती संवेदनेला जगाच्या स्थिर मॉडेलमध्ये जोडणे आहे. Brain Corp आणि UC San Diego असा विश्वास ठेवत आहेत की हा स्तर, केवळ मॉडेलच्या आकारापेक्षा, पुढील पिढीच्या स्वायत्त प्रणालींना नियंत्रित वातावरणांच्या बाहेर तैनात करण्यायोग्य बनवू शकतो.
हा लेख The Robot Report च्या वृत्तांकनावर आधारित आहे. मूळ लेख वाचा.
Originally published on therobotreport.com