A notable claim in microrobotics
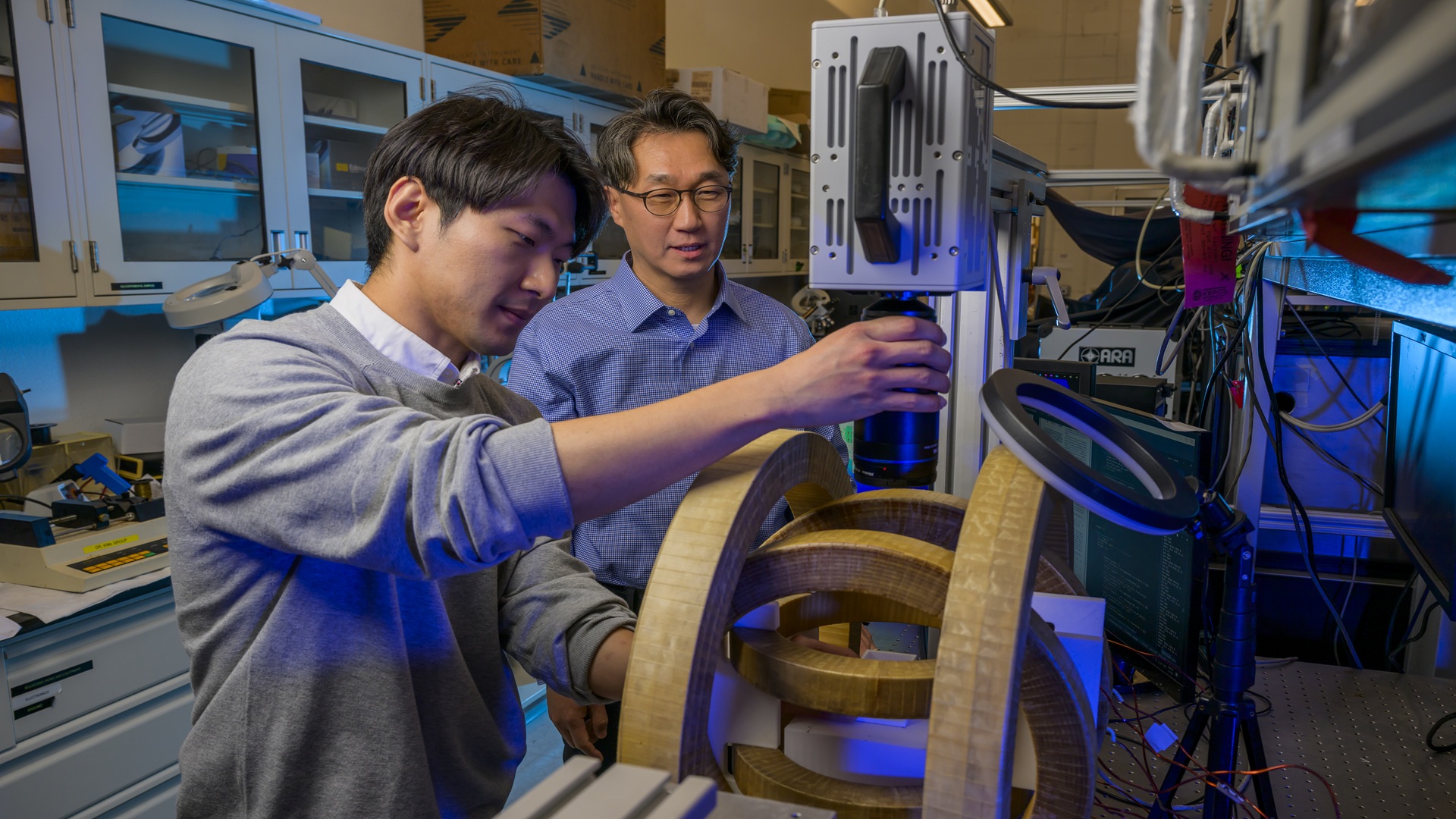
Southern Methodist University researchers say they have developed a magnetic coil system capable of controlling microrobots without cameras or tracking systems. If the approach performs as described, it would mark an important engineering shift in a field where precise motion at tiny scales often depends on external imaging and constant positional feedback.
Microrobotics has long promised new tools for medicine, manufacturing, and lab automation, but the practical challenge is always control. At extremely small scales, movement is difficult to monitor and even harder to direct reliably. Traditional systems often lean on optical tracking or camera-based feedback to determine where a device is and how it should move next. That works, but it adds complexity, cost, and infrastructure.
A system that can move microrobots without those dependencies suggests a more self-contained control architecture. Even before considering specific applications, that is a meaningful proposition. Engineering progress at small scales often comes not from making robots dramatically more capable all at once, but from removing the bulky support systems that keep them tied to specialized environments.
Why eliminating cameras matters
Camera-free control is important because imaging systems are not merely accessories in microrobotics. They often define where and how the technology can be used. If control requires line-of-sight observation and a tracking setup, deployment becomes harder outside tightly managed laboratory settings. Systems become larger, more expensive, and potentially less adaptable.
A magnetic coil arrangement that can guide motion without those tools points toward a different model. Instead of continuously seeing the robot to manage it, the control system itself does more of the work. That can reduce reliance on external monitoring and may make the overall platform easier to package into practical devices or experimental workflows.
The candidate description indicates that the work came from SMU scientists and centers specifically on magnetic control. That focus is consistent with a broader attraction of magnetic methods in microscale engineering: magnetic fields can influence tiny objects without direct physical contact. In principle, that makes them well suited for environments where mechanical intervention is impossible or undesirable.

Why this fits the direction of emerging robotics
One of the persistent gaps in robotics is the difference between what can be demonstrated in a controlled setup and what can operate robustly in messier real-world conditions. Microrobots face this problem acutely. Their scale is an advantage for delicate work, but also a source of fragility and instrumentation burden.
A simpler control stack can therefore matter as much as a more capable robot. If researchers can reduce the need for visual tracking systems, they lower one of the barriers to using microrobots more routinely. The technology becomes less about a complete room of equipment surrounding a tiny machine and more about a compact platform that can execute motion with fewer external dependencies.
That is why the claim is relevant beyond a single laboratory result. A great deal of innovation happens when support infrastructure shrinks. Early computers, rockets, and biotech systems all became more consequential once the apparatus around them became easier to manage. Microrobotics likely faces a similar transition. The field does not just need better micromachines; it needs better ways to command them without overwhelming complexity.
What this could change in practice
Without additional technical detail, the most defensible conclusion is that the reported system could simplify how microrobots are controlled. That simplification could matter in multiple settings. Research labs may value it because it reduces setup overhead. Prototype developers may value it because it makes integration more realistic. Any future medical or industrial application would value it because reduced dependence on cameras and tracking could ease deployment constraints.
The strongest near-term impact may be methodological. If a magnetic coil system can reliably produce guided movement without optical tracking, it gives researchers another way to design experiments around microrobot behavior. In engineering fields, that kind of platform change can have cascading effects, because once one part of the system becomes simpler, other parts can be redesigned around the new assumption.
That does not mean all tracking disappears from microrobotics, or that camera-based methods become obsolete. Different tasks will continue to require different levels of observation and verification. But a credible alternative control method broadens the field’s options, and that alone can accelerate development.
Caution is still warranted
The supplied description supports a focused takeaway rather than a sweeping one. It indicates that scientists at SMU developed a magnetic coil system for controlling microrobots without cameras or tracking systems. It does not, from the material provided here, establish the full performance envelope, application scope, or comparative results against other control techniques.
That distinction matters because microrobotics is an area where elegant demonstrations can outpace practical deployment. Reliability, repeatability, speed, and environmental compatibility all matter. A promising control architecture is not the same thing as a field-ready platform.
Still, even at this stage, the work stands out because it targets an enabling bottleneck rather than a cosmetic improvement. Removing camera and tracking dependence addresses one of the hidden burdens that often keeps advanced robotics from scaling beyond expert environments.
The broader significance
Microrobots are often discussed in terms of what they might someday do. Yet the decisive breakthroughs may come from less glamorous questions about how they are powered, steered, and monitored. A magnetic control system that works without cameras belongs squarely in that category. It is not just about motion. It is about reducing the amount of surrounding machinery required to make motion possible.
That is why this development deserves attention. It reflects a practical strand of innovation focused on stripping complexity out of an emerging technology. If microrobots are ever to move from carefully staged experiments toward wider use, they will need exactly this kind of engineering simplification.
The immediate claim is narrow, but the implication is broad: better control infrastructure may be just as important as better robots. In microrobotics, that may be the difference between compelling demonstrations and systems that can actually be built into useful tools.
This article is based on reporting by Interesting Engineering. Read the original article.
Originally published on interestingengineering.com