One of Robotics' Most Respected Minds Goes Independent
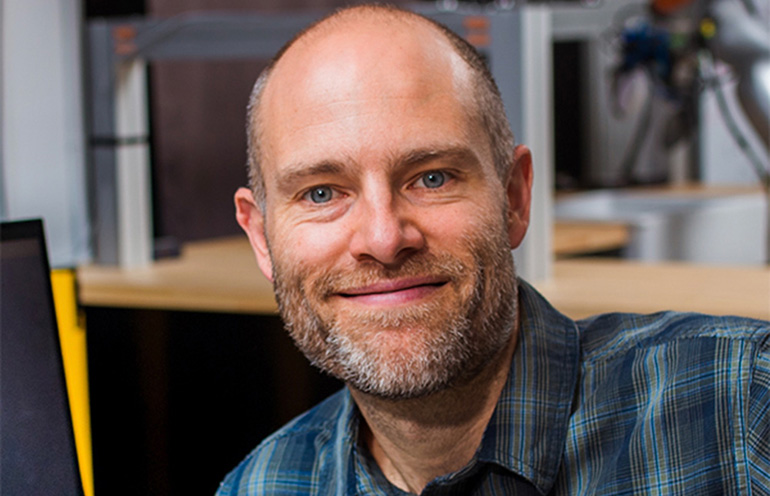
Russ Tedrake, one of the most influential researchers in robotics and one of the architects of the current wave of physically capable AI systems, is returning to the spotlight — this time as the founder of an undisclosed stealth AI startup. Tedrake will publicly unveil the venture at the Robotics Summit and Expo, scheduled for May 27-28 at the Thomas M. Menino Convention and Exhibition Center in Boston. The announcement has generated significant anticipation in the robotics community, where Tedrake's name carries substantial weight built over decades of research at MIT and industry leadership at Toyota Research Institute.
Tedrake most recently served as Senior Vice President of Large Behavior Models at Toyota Research Institute, where he led efforts to develop the kinds of foundation models for robot behavior that represent the current frontier of physical AI. His departure from TRI to start an independent venture signals both his conviction that the time is right to build a company around these ideas and that the capabilities required to do so have reached a threshold of maturity.
What Is Physical AI and Why Does It Matter
Physical AI refers broadly to AI systems that operate in and interact with the physical world — robots, autonomous vehicles, and other machines that must perceive their environment, plan actions, and execute those plans in real-time under conditions of uncertainty. It is a fundamentally harder problem than language or image AI because the physical world does not forgive errors the way a text editor does. A robot that misidentifies an object and commands the wrong grip force does not produce a garbled sentence — it breaks something, hurts someone, or fails the task entirely.
Tedrake has spent his career attacking this problem from the theoretical foundations upward. At MIT's Computer Science and Artificial Intelligence Laboratory, he developed reinforcement learning algorithms for continuous control problems — the mathematical machinery that underlies how robots learn to move fluidly rather than in jerky, pre-programmed trajectories. His work on manipulation, locomotion, and the dynamics of contact has been foundational to modern robotics research.
Large Behavior Models: The New Frontier
The focus of Tedrake's work at Toyota Research Institute — large behavior models — represents the current leading edge of the field. Drawing an analogy to large language models in text AI, large behavior models are trained on vast datasets of robot behavior, either teleoperated demonstrations or simulation-generated experience, and learn general-purpose policies that can be adapted to new tasks and environments with relatively few examples.
The success of this approach in early deployments has been striking. Robots trained on large behavior models can generalize across objects they have not seen before, adapt to new environments without task-specific reprogramming, and recover from failures in ways that traditional controllers cannot. The challenge is that training these models at scale requires both data — expensive to collect in the physical world — and substantial compute, and the resulting models must still be paired with robust control systems that can handle real-time physics.
The Startup Ecosystem Around Physical AI
Tedrake is entering a startup landscape that has become increasingly competitive. Covariant, Figure AI, Physical Intelligence, and several other well-funded companies are pursuing variations of the large behavior model approach to general-purpose robot intelligence. Physical Intelligence in particular has attracted significant attention and funding, and its leadership overlaps with the academic robotics community in ways that create both competitive and collaborative dynamics.
What Tedrake brings to this ecosystem is a specific combination of deep theoretical knowledge — he is one of the few people in the world who can move fluently between the mathematics of control theory and the practical engineering of robot hardware — and executive experience running a large research organization. His time at TRI gave him exposure to the industrial-scale infrastructure required to train, test, and deploy robotic systems at a level that purely academic experience cannot provide.

Boston as a Robotics Hub
The choice of the Robotics Summit in Boston for the unveiling is fitting. Boston has emerged as one of the global centers of robotics innovation, anchored by MIT, Boston Dynamics, and a dense ecosystem of startups and research institutions. The Summit draws engineers, investors, and executives from across the industry, making it the logical venue for a high-profile announcement from a figure of Tedrake's stature.
Details of the startup — its name, funding status, specific technical focus, and team — remain unreleased ahead of the May event. The robotics community will be watching closely. When someone with Tedrake's track record steps out of a major research institution to build a company, the specific bet they are making on the future of the technology tends to be worth understanding in detail.
This article is based on reporting by The Robot Report. Read the original article.
Originally published on therobotreport.com