NASA 聚焦用于自主与飞行测试的室内工具
NASA 发布了对位于艾姆斯研究中心的 NASA 无人自主研究综合体(NUARC)内可用测试设施的进一步介绍。这篇图片报道重点展示了两项核心能力:用于生成受控气流条件的大型可编程 WindShaper 风扇阵列,以及用于移动式风场数据采集的配套 WindProbe 系统。
尽管这篇帖子篇幅简短,但它提供了一个有用的缩影,展示了 NASA 正在为低速和悬停飞行研究提供怎样的基础设施。这些设施旨在帮助研究人员在可重复条件下研究飞行器行为,尤其是在风、阵风和气流梯度会让室外自主或无人操作更难验证的环境中。
专为受控风场研究打造的风墙
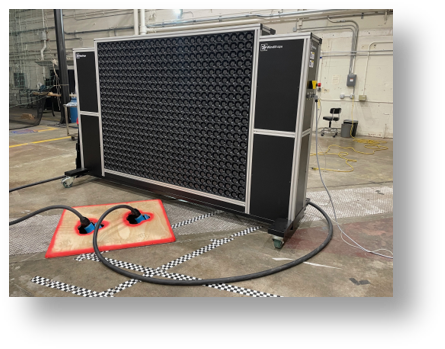
最引人注目的系统是 WindShaper,它被描述为一个大型风扇阵列,可用于动态低速和悬停飞行研究。NASA 表示,该装置非常适合通过简单的 Python API 生成任意风速梯度和阵风,这意味着研究人员可以对特定气流条件进行编程并复现,而不必依赖自然天气。
根据该机构介绍,这个阵列尺寸为 9 英尺乘 7 英尺,由 1,134 个风扇组成,排列成 567 个“风像素”。这种架构很重要,因为它将这面风墙变成了一个可控场,而不是单一的均匀吹风装置。通过程序化调整风扇,研究人员可以重现稳定风、突发阵风以及更复杂的梯度,从而更接近飞行器在真实环境中遇到的扰动。
NASA 列出的风速范围为 0 到 16 米每秒,相当于 0 到 36 英里每小时,或 31 节。该系统的加速度额定值为 4 米每二次方秒,减速度为 2.5 米每二次方秒。这些数据表明,该系统不仅能够维持设定条件,还能以足够动态的方式变化,以测试控制响应和稳定性。
为什么可编程风场很重要
室内风场生成对自主研究尤为重要,因为它能让开发者隔离变量。室外测试仍然至关重要,但其精确重复性天生较差。可编程阵列通过创建一个可调整、可测量、可重复运行的物理环境,在仿真与外场试验之间架起了一座桥梁。
这对无人机、悬停系统以及其他对局部气流高度敏感的低速飞行器具有现实价值。阵风和方向梯度可能会挑战导航、感知和控制系统。能够用脚本有意创造这些条件,是一项有意义的研究优势。
WindProbe 为实验室内测量增添移动能力
NASA 的帖子还重点介绍了配套的 WindProbe,它专为快速流场勘测而设计。它并非固定仪器,而是用于手持式移动数据采集,让用户能够绘制室内测试环境不同区域的风况分布。
该机构表示,WindProbe 使用实验室的 OptiTrack 运动捕捉系统来提取探头尖端 5 孔锥形探头的位置和姿态。这种组合很重要,因为当传感器的确切位置和朝向已知时,风数据才更有用。运动捕捉提供了理解测试区域气流如何变化所需的空间参考。
实际上,WindProbe 似乎是在为 WindShaper 所创建的环境提供验证和巡测工具。如果研究人员编程设定某种梯度或阵风轮廓,移动式探头就可以帮助确认实际的三维流场是什么样子。这就把设定条件与测量条件之间的重要闭环补上了。
自主研究更广泛推进的一部分
这一设施介绍表明,随着无人系统变得更强大、更复杂,NASA 正在支持的工作类型也随之演进。自主研究越来越依赖处于软件仿真与开放空域飞行之间的测试环境。带有可编程扰动的室内实验室使团队不仅能测试飞行器是否能飞,还能测试它在环境变化时响应是否可靠。
这对悬停和低速操作尤为相关,因为局部风效应会带来放大后的影响。它同样有助于传感器验证、制导逻辑以及边界案例中的恢复行为。当这些行为能够在可重复的物理刺激下进行测试时,研究人员就能更清楚地比较算法和设计。
NASA 对 Python API 的强调也值得注意。这表明该系统旨在融入现代实验工作流,在其中测试条件可以被脚本化、自动化,并与其他测量工具同步。这样的接口降低了研究人员的使用门槛,也让参数扫描或重复场景测试更易实施。
NUARC 快照揭示了什么
即便篇幅简短,NASA 这篇文章也揭示了一种以可控性、测量和迭代为核心的测试理念。WindShaper 创建定制气流条件,WindProbe 通过运动捕捉以空间定位感知这些条件。二者共同构成了一个室内平台,用于研究当空气不再静止时,飞行器和自主系统会如何表现。
这篇帖子并未展示具体任务或研究成果,而是强调了支撑性基础设施。而这往往正是未来进展的起点。在新的无人能力进入实地部署之前,它们通常都要先经过一个能有意引入并清晰理解扰动的环境。NUARC 这套设备看起来正是为此而建。
对于从事动态低速飞行研究的人员来说,它的价值很直接:一个大型可编程风场、可测量的气流,以及受控的室内环境。对于 NASA 而言,这篇文章提醒人们,自主技术的进步不仅取决于飞行器和软件,也取决于用于测试它们的环境质量。
本文基于 NASA 的报道。阅读原文。
Originally published on nasa.gov