GPS இலக்கு ஆகிறது
ட்ரோன்கள் இப்போது GPS-ஐ உறுதியாகக் கருத முடியாத சூழல்களில் அதிகமாக செயல்படுகின்றன. Breaking Defense மூல உரை, Vantor வழங்கியதாக, jamming மற்றும் spoofing கருவிகள் மலிவாகவும், அதிகம் கிடைக்கக்கூடியதாகவும், பயன்படுத்த எளிதாகவும் மாறிவருகின்றன என்று விவரிக்கிறது. மனிதர் இல்லாத விமானங்களுக்கு, இது நேரடி பணித் தடையை உருவாக்குகிறது: நம்பகமான நிலைத் தகவல் இல்லாமல் ட்ரோன்கள் பாதையிலிருந்து விலகலாம், பணிகளை முடிக்கத் தவறலாம், அல்லது இடைமறிக்க எளிதாக இருக்கலாம்.
இதற்கான முன்மொழியப்பட்ட தீர்வு 3D vision-based navigation. செயற்கைக்கோள் சிக்னல்களையே மட்டும் சாராமல், ட்ரோன் தனது onboard camera-களையும் உயர்தர வரைபடத் தரவையும் பயன்படுத்தி, நேரடி நேரத்தில் பார்க்கும் விடயங்களை நிலத்தரத்தின் அறிந்த பிரதிநிதித்துவத்துடன் ஒப்பிடுகிறது. பொருத்தம் துல்லியமாக இருந்தால், GPS மறுக்கப்பட்டாலும் அல்லது தாழ்த்தப்பட்டாலும் ட்ரோன் வழிச்செலுத்தலைத் தொடர முடியும்.
Absolute Positioning மற்றும் Dead Reckoning
மூலம் absolute positioning-ன் முக்கியத்துவத்தை வலியுறுத்துகிறது: ஒரு குறிப்பிட்ட தருணத்தில் ட்ரோன் துல்லியமாக எங்கே உள்ளது என்பதை அறிதல். GPS கிடைக்கும் போது இதை நேரடியாக வழங்குகிறது. இல்லையெனில், பல அமைப்புகள் relative positioning-க்கு மாறி, கடைசியாக அறிந்த இடத்திலிருந்து onboard அளவீடுகளின் அடிப்படையில் இயக்கத்தை மதிப்பிடுகின்றன. சிறிய பிழைகள் காலப்போக்கில் சேர்ந்து பெரிய பிழையாக மாறுவதால் இந்த அணுகுமுறை வேகமாகக் குன்றலாம்.
மூலத்தில் Vantor-ன் Raptor products-இன் senior director என குறிப்பிடப்பட்டுள்ள Paul Millhouse, இந்தப் பிரச்சினையை இவ்வாறு விவரிக்கிறார்: GPS இழந்தவுடன், அமைப்பிற்கு அது முன்பு எங்கே இருந்தது என்பது தெரிந்திருக்கலாம், ஆனால் தற்போது துல்லியமாக எங்கே உள்ளது என்பது தெரியாது. தூரமும் காலமும் அதிகரிக்கையில் இந்தத் தெரியாமை வளரும். ராணுவ, லாஜிஸ்டிக்ஸ், மற்றும் reconnaissance பணிகளுக்கு, இப்படிப் பெருகும் இடப் பிழை வெற்றி-தோல்வி இடையிலான வேறுபாடாக இருக்கலாம்.

3D நிலத்தரவு ஏன் முக்கியம்
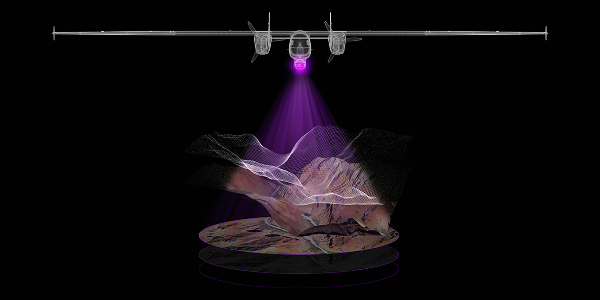
Vision-based navigation குறிப்பு தரவின் மீது சார்ந்துள்ளது. ட்ரோனுக்கு சுற்றுப்புற நிலத்தரத்தின் நம்பகமான மாதிரி தேவை, அதனால் அது நேரடி camera input-ஐ வரைபடத்துடன் பொருத்த முடியும். மூலம் Vantor-ன் Raptor தீர்வை பல தசாப்தங்களாகச் சேகரிக்கப்பட்ட global mapping-ஐ பயன்படுத்தி, real-time positioning-க்கு 3D reference layer வழங்குவதாக விவரிக்கிறது.
3D அம்சம் முக்கியம், ஏனெனில் குறைந்த உயரத்தில் பறக்கும் மனிதர் இல்லாத விமானங்கள் உலகை தட்டையான படமாக அனுபவிப்பதில்லை. நிலத்தர வடிவம், உயரம், கட்டமைப்புகள், ridgelines, மற்றும் பிற அம்சங்கள் எல்லாம் ஒரு அமைப்பு தன்னைத் தானே localize செய்ய உதவும். Raptor-ன் sales head Kara Kramer, அமைப்பு தட்டையான 2D image-ஐ விளக்குவதற்குப் பதிலாக நிலத்தரத்தைப் புரிந்துகொள்கிறது என்று கூறுகிறார்.
Counter-drone அழுத்தம் அதிகரிக்கிறது
வழிச்செலுத்தல் சவால், ட்ரோன்களுக்கும் counter-drone அமைப்புகளுக்கும் இடையிலான பரந்த போட்டியின் ஒரு பகுதி. ட்ரோன்கள் மலிவாகவும் பரவலாகவும் மாறுவதால், எதிரிகளுக்கு அவற்றின் guidance systems-ஐ தாக்கும் ஊக்கம் அதிகரிக்கிறது. ஒரு jammer அல்லது spoofer மட்டும் ஒரு பகுதிக்குள் வழிச்செலுத்தலை குழப்ப முடியும்; இதனால் சுத்தமான செயற்கைக்கோள் சிக்னல்களைப் பொறுத்திருக்கும் அமைப்புகள் பாதிக்கப்படலாம்.
இது குறிப்பாக contested military சூழல்களில் பொருத்தமானது, ஆனால் GPS coverage சீரற்றதாகவோ அல்லது பாதிப்புக்குட்பட்டதாகவோ இருக்கும் தொலைதூரம் மற்றும் infrastructure-poor சூழல்களுக்கும் பொருந்துகிறது. மூலம் இதை tyranny of distance என்று குறிப்பிடுகிறது: நம்பகமான நிலைத் தகவல் இல்லாமல் நீண்ட தூரங்களில் செயல்படுவது.
வணிக மற்றும் ராணுவ ஒத்திசைவு
கட்டுரை பாதுகாப்பு பயன்பாட்டு வழக்குகளை மையமாகக் கொண்டிருந்தாலும், அடிப்படை பிரச்சினை பரந்தது. logistics drones, inspection aircraft, disaster-response systems, மற்றும் autonomous platforms எல்லாவற்றுக்கும் வலுவான positioning தேவை. மனிதர்களுக்கு செல்லப் பாதுகாப்பற்ற அல்லது நடைமுறையில் கடினமான இடங்களுக்கு மனிதர் இல்லாத அமைப்பை அனுப்பும் எந்தப் பணியும், வழிச்செலுத்தல் ஒரே வெளி சிக்னலின் மீது சார்ந்திருந்தால் மேலும் பலவீனமாகிறது.
3D vision-based navigation GPS-ஐ கட்டாயமாக மாற்ற வேண்டியதில்லை. இன்னும் யதார்த்தமான கட்டமைப்பு, GPS கிடைக்கும் போது அதை பயன்படுத்தி, கிடைக்காத போது vision-ஐ cross-check அல்லது substitute ஆகப் பயன்படுத்தும். இப்படியான layered approach autonomy-யில் பொதுவானது: பல சென்சார்கள் மற்றும் reference systems ஒரே input-இன் மீதான சார்பைக் குறைக்கின்றன.
வரம்புகள் மற்றும் திறந்த கேள்விகள்
மூலம் sponsored piece ஆகும், மேலும் Vantor-ன் Raptor product-ஐ மையமாகக் கொண்டுள்ளது; எனவே அதன் கோரிக்கைகளை தனித்துவமான comparative test என அல்லாமல், நிறுவனம் ஆதரிக்கும் அணுகுமுறையாகவே படிக்க வேண்டும். வழங்கப்பட்ட உரையில் benchmark data, field trial முடிவுகள், பிழை விகிதங்கள், compute தேவைகள், அல்லது வானிலை மற்றும் காட்சித்திறன் கட்டுப்பாடுகளின் கீழான செயல்திறன் பற்றிய தகவல் இல்லை.
இந்த விவரங்கள் முக்கியம். Camera-based navigation இரவு, புகை, பனி, அம்சங்கள் குறைந்த நிலப்பரப்பு, வரைபடத்தின் تاز்மை, sensor quality, மற்றும் onboard processing வரம்புகள் ஆகியவற்றால் பாதிக்கப்படலாம். உயர்தர 3D maps-ஐவும் ட்ரோன்கள் செயல்படும் பகுதிகளுக்கு தொடர்ந்து பராமரித்து கிடைக்கச் செய்ய வேண்டும். கருத்தின் வலிமை, இந்த நடைமுறை கட்டுப்பாடுகளை எவ்வளவு நன்றாக கையாள்கிறோம் என்பதையே சார்ந்துள்ளது.

செல்லும் திசை
இந்த எச்சரிக்கைகளைக் கடந்து பார்த்தாலும், மூலோபாய மாற்றம் தெளிவாக உள்ளது. GPS interference அமைப்பதை எளிதாக்கும் போது, autonomy systems dirty radio-frequency சூழல்களிலும் பயனுள்ளதாக இருக்கும் positioning முறைகளை தேவைப்படுகின்றன. 3D vision-based navigation மிக உறுதியான பாதைகளில் ஒன்றாகும், ஏனெனில் அது physical world-ஐயே reference ஆகப் பயன்படுத்துகிறது.
நிலத்தரத்திற்கு நெருக்கமாகப் பறக்கும் ட்ரோன்களுக்கு, terrain background அல்ல. அது ஒரு navigational signal. அமைப்புகள் அந்தச் சிக்னலை மிகத் துல்லியமாகப் படிக்க முடிந்தால், எதிரிகள் jam அல்லது spoof செய்யக்கூடிய செயற்கைக்கோள்களின் மீது அவை குறைவாகவே சார்ந்திருக்கும்.
இந்த கட்டுரை Breaking Defense-ன் செய்திப்பரப்பை அடிப்படையாகக் கொண்டது. மூலக் கட்டுரையைப் படிக்கவும்.
Originally published on breakingdefense.com