NASA、自律性と飛行試験のための屋内ツールを紹介
NASA は、エイムズ研究センターにある NASA 無人自律研究複合施設、NUARC で利用できる屋内試験施設を詳しく紹介した。画像記事が焦点を当てているのは、2 つの中核機能だ。制御された気流条件を生成するための大型プログラム可能ファンアレイ WindShaper と、移動しながら風データを収集する補完システム WindProbe である。
記事は簡潔だが、NASA が低速およびホバリング飛行研究向けに提供しているインフラの一端を知るうえで有用なスナップショットを示している。これらの施設は、特に風、突風、勾配がある環境で、屋外では自律運用や無人運用の検証が難しくなる状況において、研究者が航空機の挙動を再現可能な条件で調べるのを支援するよう設計されている。
制御された風の研究のために構築されたファンウォール
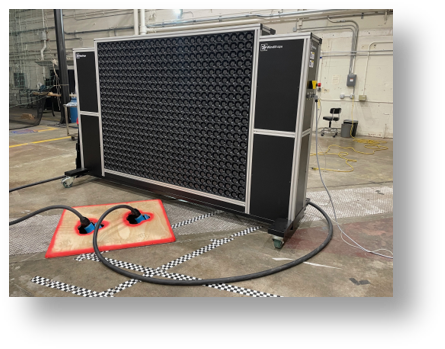
最も目立つシステムは WindShaper で、動的な低速およびホバリング飛行研究に利用できる大型ファンアレイとして説明されている。NASA によると、この構成は、単純な Python API を通じて任意の風勾配や突風を生成するのに理想的であり、研究者は自然の気象に頼るのではなく、特定の気流条件をプログラムして再現できる。
同機関によれば、このアレイは 9 フィート×7 フィートで、1,134 台のファンが 567 個の「風ピクセル」として配置されている。この構造が重要なのは、壁全体を単一の均一な送風機ではなく、制御可能な場に変えるからだ。ファンをプログラムで調整することで、研究者は定常風、急な突風、そして航空機が実環境で遭遇する擾乱により近い複雑な勾配を再現できる。
NASA は風速範囲を 0 から 16 メートル毎秒、つまり 0 から 36 マイル毎時、または 31 ノットと示している。このシステムは、4 メートル毎秒毎秒の加速度と 2.5 メートル毎秒毎秒の減速度にも対応している。これらの数値は、設定条件を維持するだけでなく、制御応答や安定性を試験できる程度に動的に変化させられる能力を示している。
なぜプログラム可能な風が重要なのか
屋内での風生成は、自律研究にとって特に重要だ。なぜなら、開発者が変数を切り分けられるからである。屋外試験は依然として不可欠だが、精密に再現するのは本質的に難しい。プログラム可能なアレイは、調整、測定、必要なだけ再実行できる物理環境を作ることで、シミュレーションと実地試験の橋渡しをする。
これは、局所的な気流に非常に敏感になり得るドローン、ホバリングシステム、その他の低速航空機にとって実用的な価値がある。突風や方向性のある勾配は、航法、認識、制御システムにとって難題となる。これらの条件をスクリプトで意図的に作り出せることは、研究上の大きな利点だ。
WindProbe が実験室内での移動計測を追加
NASA の投稿では、流れの迅速な調査用に設計された WindProbe も紹介されている。固定式の計測器としてではなく、手持ちで移動しながらデータを収集するためのもので、ユーザーは屋内試験環境のさまざまな場所で風況をマッピングできる。
NASA は、WindProbe が実験室の OptiTrack モーションキャプチャシステムを使用して、先端にある 5 穴コーンプローブの位置と向きを抽出すると説明している。この組み合わせが重要なのは、センサーの正確な位置と向きが分かって初めて、風データの有用性が高まるからだ。モーションキャプチャは、試験領域全体で気流がどのように変化するかを理解するために必要な空間基準を提供する。
実質的に WindProbe は、WindShaper が作り出す環境を検証・調査するためのツールとして機能しているようだ。研究者がある勾配や突風プロファイルをプログラムした場合、移動式プローブは流れ場が空間内で実際にどのように見えるかを確認するのに役立つ。これにより、指令された条件と測定された条件の間の重要なループが閉じる。
自律研究のより広い推進の一部
この施設の説明は、無人システムがより高性能でより複雑になる中で NASA が支援している研究の種類を示している。自律研究は、ソフトウェアシミュレーションと屋外飛行の中間に位置する試験環境にますます依存している。プログラム可能な擾乱を備えた屋内ラボは、航空機が飛べるかどうかだけでなく、環境が変化したときにどれだけ確実に応答できるかも試験できる。
これは特にホバリングや低速運用に重要であり、局所的な風の影響が大きく出る可能性がある。また、センサー検証、誘導ロジック、境界条件における復帰挙動にも関係する。これらの挙動を再現可能な物理刺激に対して試験できれば、研究者はアルゴリズムや設計を比較するためのより明確な基準を得られる。
NASA が Python API を重視している点も注目に値する。これは、試験条件をスクリプト化し、自動化し、他の計測ツールと同期できる現代的な実験ワークフローにシステムが統合されることを示唆している。こうしたインターフェースは研究者の負担を軽減し、パラメータ掃引や繰り返しシナリオ試験を実用的にする。
NUARC のスナップショットが示すこと
短い記事ながら、NASA の記事は、制御性、計測、反復を中心に据えた試験哲学を明らかにしている。WindShaper は調整された気流条件を作り出す。WindProbe はモーションキャプチャを通じて位置情報を伴ってそれらの条件を測定する。両者を組み合わせることで、周囲の空気が静的とは程遠いときに航空機や自律システムがどう振る舞うかを調べる屋内プラットフォームが提供される。
この投稿は特定のミッションや研究成果を示しているわけではない。代わりに、支援インフラを強調している。そこが未来の進歩が始まる場所であることは多い。新しい無人能力が現場展開に進む前に、通常は擾乱を意図的に導入し、明確に理解できる環境を通過する。NUARC で紹介された機器は、まさにその役割のために作られているようだ。
動的な低速飛行に取り組む研究者にとって、その価値は明快だ。大きくプログラム可能な風場、測定可能な気流、そして制御された屋内環境。NASA にとってこの記事は、自律性の進歩が車両やソフトウェアだけでなく、それらを試験する環境の質にも依存していることを思い起こさせる。
この記事は NASA の報道に基づいています。元の記事を読む。
Originally published on nasa.gov