人間のように動くためのエンジニアリング課題
人間の筋肉は単独では機能しません。すべての動きには、正確なシーケンスで協調する数十の筋肉が含まれ、個々の筋肉が動きのさまざまなポイントで異なる力プロファイルを供給しています。この分散型で協調された動きのアプローチは、人間と動物の動きに流動性と適応性を与えるものであり、機械でこの動きをレプリケートすることを非常に困難にしているものです。
従来のロボット駆動は、離散的で集中した駆動ユニットから動きを生成するモーターとサーボに依存しています。これらのシステムは正確で反復的な産業タスクに優れていますが、実際のところ少数のモーターが働いており、多くのアクチュエーターが協力して動作する分散ネットワークではないため、機械的に感じられる動きを生成します。
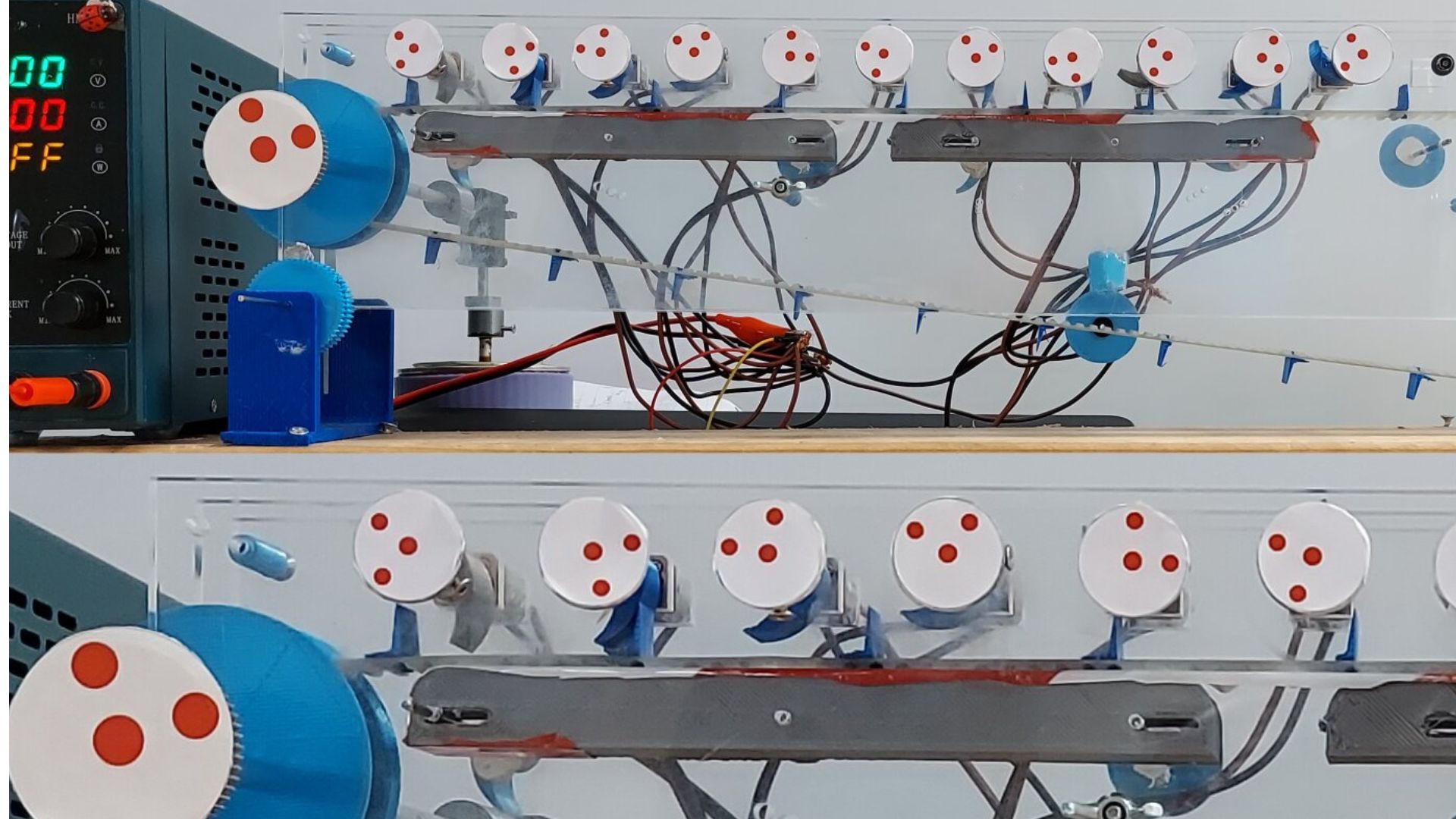
ブリストル大学の研究者は異なるアプローチを採用しました。彼らの人工モーターシステムは、集中制御ではなく相互作用から生じる集団動作を持つシンプルな機械モーターのネットワークで構成されています。結果として、生物学的筋肉システムの分散ダイナミクスに密接に模倣する動きです。
システムの仕組み
ブリストルのモーターネットワークは、生物学的筋肉を構成するモーターユニットに原則として類似する比較的シンプルな個々のアクチュエーターの周りに構築されています。各個々のアクチュエーターはその能力に限定されていますが、ネットワークに相互接続されると、システム全体が単一のアクチュエーターでは生成できない動作を生成します。
これは生物学的筋肉の構造を反映しています。人間の筋肉線維は収縮または弛緩することができますが、経験される段階的な力出力と滑らかな動きは、異なる時点で異なる数の線維の採用から来ています。ブリストルシステムはこの原理を機械的アクチュエーターに適用し、複雑な個々のユニットの代わりにネットワーク相互作用を使用して洗練された集団行動を生成します。
正確な軌跡と力プロファイルをプログラムするのではなく、コントローラーは高レベルのコマンドを発行し、ネットワークダイナミクスが協調の詳細を処理できるようにします。これは予期しない負荷と環境変動よりも従来の制御アプローチに対してより堅牢です。

ソフトロボット工学での応用
ソフトロボット工学(硬い構造ではなく順応性のある材料で作られたロボット)は、ロボット工学研究で最も活発な領域の1つとなっています。ソフトロボットは人間とより安全に相互作用でき、狭い不規則な空間を通して移動でき、剛性マニピュレーターのリスクなしで繊細なオブジェクトを処理できます。
ソフトロボット工学の課題は駆動でした。ほとんどのソフトアクチュエーターシステムは正確に制御するのが難しく、比較的遅い限定的な動きを生成する傾向があります。多くのアクチュエーターをより動的で自然な動きのために協調できる人工モーターネットワークは、ソフトロボットができることを大幅に拡張する可能性があります。
義肢およびウェアラブルデバイス
最も直接的なアプリケーション領域の1つは義肢です。現在の義肢、高度な筋電図設計でも、ユーザーがイライラするような方法で機械的に感じることがよくあります。人工モーターネットワーク原理に基づいて構築された義肢は、より自然な動きのダイナミクスを生成し、日常生活の負荷と状況にあります。
制御の分散的な性質は、堅牢性の潜在的な利点も提供します。個々のアクチュエーターユニットが失敗した場合、ネットワークは補償でき、肢全体が機能を失うのではなく。人間の動きを支援するウェアラブルリハビリテーションデバイスは別の短期的なアプリケーションを表しており、特に脳卒中の回復と移動支援に。

展開への道
ブリストル研究は初期段階にあります。展開可能なデバイスを生成するのではなく原理を実証してシステム動作を特徴付けます。ラボデモンストレーションから商業義肢またはリハビリテーションウェアラブルデバイスへの道には、実質的なエンジニアリング、規制承認、および臨床検証が含まれます。
しかし、根本的な概念(生物学的な分散筋肉協調原理を機械システムに適用する)は十分に説得力があり、複数の研究グループと医療機器会社がそれを追求する可能性があります。人工モーターネットワークを備えたソフトロボットが最終的に生物学的肢の自然さに近い何かで動くことができれば、人間の側で実行できるタスクの範囲は劇的に拡大します。
この記事はInteresting Engineeringのレポートに基づいています。元の記事を読む。
Originally published on interestingengineering.com