知覚の安全性、パフォーマンスのみではない
人型ロボットが研究環境から商用および産業的展開への移行を進める中で、ロボットが世界をどのように知覚し航行するかの技術的枠組みは、その物理的な能力と同じくらい重要になっています。NVIDIA GTC 2026では、RealSenseはLimX Dynamicsを使用した人型ロボット航行をデモンストレーションし、安全性を事後的な考慮ではなく主要な設計制約として扱う知覚アーキテクチャを披露しました。
RealSenseのCEOであるNadav Orbach氏は、課題を直接述べています:人型ロボットは3次元空間で、人々のそばで、常に変わる環境で動作します。ロボットが人間のそばで安全に動作するのであれば、知覚は生のセンサー以上の責任を担います。ロボットの視覚皮質として機能し、正確な位置特定、衝突回避、地形理解、および非構造化環境での安定した予測可能な動きを実現する必要があります。
技術的基盤:CuVSLAMと深度センシング
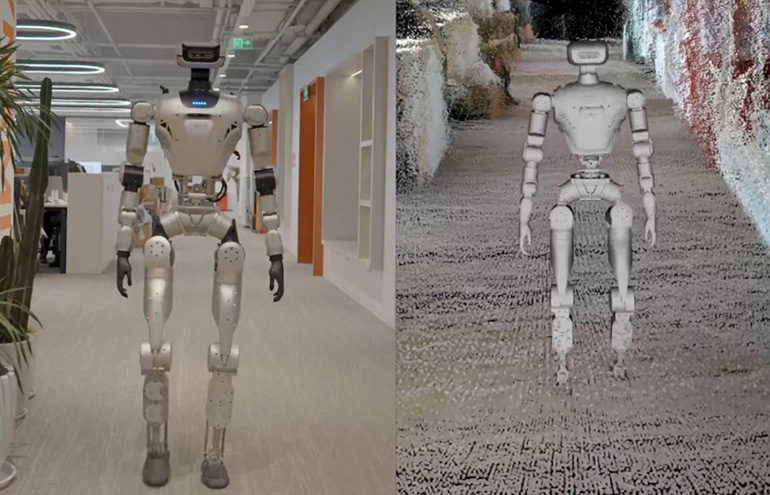
RealSenseのデモンストレーションは、深度カメラとNVIDIAのCuVSLAM(GPU高速化ビジュアル同時位置特定とマッピングライブラリ)を使用して、LimX人型ロボットプラットフォームでリアルタイム3Dマッピングと位置特定を実現しました。SLAMは自律航行の基本的な能力です:ロボットが環境地図を構築しながら、同時にその地図内での自身の位置を追跡でき、GPSや事前インストールされたビーコンなどの外部インフラストラクチャに依存する必要がありません。
深度カメラは、環境の正確な3D表現を構築するために必要な範囲データを提供し、さまざまな距離と高さの障害物を検出します。階段、スロープ、狭い通路、散らかった床を含む人間向けに設計された地形を航行する二足人型ロボットの場合、正確な3D地形理解は安全な移動に不可欠です。2Dでのみ見える、または深度認識が限定的なロボットは、障害物の誤判定に陥りやすく、人や物体と衝突することになります。
NVIDIAのCuVSLAMは同社のJetsonエッジコンピューティングモジュール上で実行され、ロボットプラットフォームに益々組み込まれており、リアルタイム視覚処理に必要な計算能力を提供します。GPUハードウェア上のSLAMを高速化することにより、CuVSLAMは人と障害物の位置が継続的に変わる動的環境に十分高速な速度で深度データを処理できます。

人間とロボットのコラボレーションにおける安全命令
RealSenseのGTCプレゼンテーションでの安全性の強調は、ロボット業界が人間の共有空間で有能なモバイルロボットの展開にアプローチする方法の広範なシフトを反映しています。産業用ロボットは歴史的に、人間とロボットの衝突を防ぐためにケージで囲まれた環境で動作しています。協調ロボットは、人間に近い場所で動作できる力制限されたアームを導入しました。人型ロボットは次のステップです:人間環境を自由に航行し、潜在的に人間と直接対話するように設計されたプラットフォーム。
これにより異なる安全体制が生成されます。倉庫、工場の床、または小売環境を移動する人型ロボットは、予測不可能な人間の動き、様々な照明、深度センサーを混乱させる反射面、および予期しない方法で変わる可能性のある地形に対応する必要があります。落下は特に危険です - 意味のあるサイズの人型ロボットが落下した場合、その下にいる人を傷つける可能性があります。
RealSenseデモンストレーションのLimXプラットフォームは、冗長な知覚を通じてこれらのシナリオに対処するために設計されているようです。複数のカメラモダリティとGPU高速化処理を使用して、能力の低いシステムが失敗する可能性のある条件下でも信頼できる環境モデルを維持します。
GTCコンテキスト:Nvidiaのロボティクス推進
NVIDIA GTC 2026は、異常に密集したロボティクス発表を展示しており、Jensen HuangのロボティクスをデータセンターAIと並ぶ主要なビジネス柱にするという宣言された承諾を反映しています。NvidiaのJetsonプラットフォームとIsaacロボティクススタックは、企業を自律システムの支配的な計算プロバイダーとして位置づけており、これはGPUが現在AI訓練と推論で果たしている役割に類似した役割です。
RealSense-LimXデモンストレーションは、Nvidiaがロボティクス企業のエコシステムを有効にして、ハードウェアとソフトウェアスタック上で有能なシステムを構築する方法の一例です。Nvidiaハードウェアに最適化された事前構築ライブラリとしてCuVSLAMを提供することで、同社はロボティクス企業の開発負担を軽減し、計算層を標準化します。これはAIデータセンター市場で上手く機能した戦略です。
より広範な意味は、人型ロボット航行が、安全に焦点を当てた知覚アーキテクチャ(RealSenseアプローチなど)が支援インフラストラクチャを提供する制限された産業環境での商用展開が可能になる成熟度に近づいているということです。問題はもはやロボットが人間空間を航行できるかどうかではなく、継続的な人間の監督なしに動作するために十分に信頼できず安全に行うことができるかどうかです。
この記事はThe Robot Reportのレポーティングに基づいています。元の記事を読む。
Originally published on therobotreport.com