ロボティクス企業は、生の視覚を超えて、より深い空間理解へと目を向けている
Brain Corp とカリフォルニア大学サンディエゴ校は、自律ロボットが複雑な環境をどのように理解するかを改善するため、研究協力を拡大している。研究の中心はセマンティックマッピングと、両者が「コンテクスチュアル・グラウンディング層」と呼ぶものだ。これは物理空間のデジタル表現であり、商業および産業の現場でロボットが周囲をより確実に解釈できるようにすることを目的としている。
この発表は、ロボティクス開発者がビジョン-ランゲージ-アクションやその他の生成 AI システムを現実の機械に取り込もうと競い合う中で行われた。これらのモデルによって、ロボットが画像や言語から推論できる範囲は広がったが、核心的な問いは、混雑して予測不能な環境に展開できるだけの一貫性と耐性を備えているかどうかだ。
Brain Corp と UC San Diego が、なぜ地図が依然重要だと考えるのか
提供されたソースによれば、この協力関係は、業界が視覚データからより直接的に動作する AI システムを探る一方で、文脈を伴う 3D セマンティックマップは依然として不可欠だという立場を取っている。つまり、より豊かな知覚は構造化された空間理解の必要性をなくすのではなく、むしろその必要性を一層高める可能性がある。
これは、エンドツーエンド AI への期待が高まる分野では重要な立場だ。もしこの提携の見立てが正しければ、実用的な自律性への道は、単により大きなモデルだけでなく、物体が何で、どこにあり、ロボットが実行しようとしているタスクとどう関係するのかを機械に教える、堅牢なワールドモデルにも依存することになる。
SLAM から状況認識へ
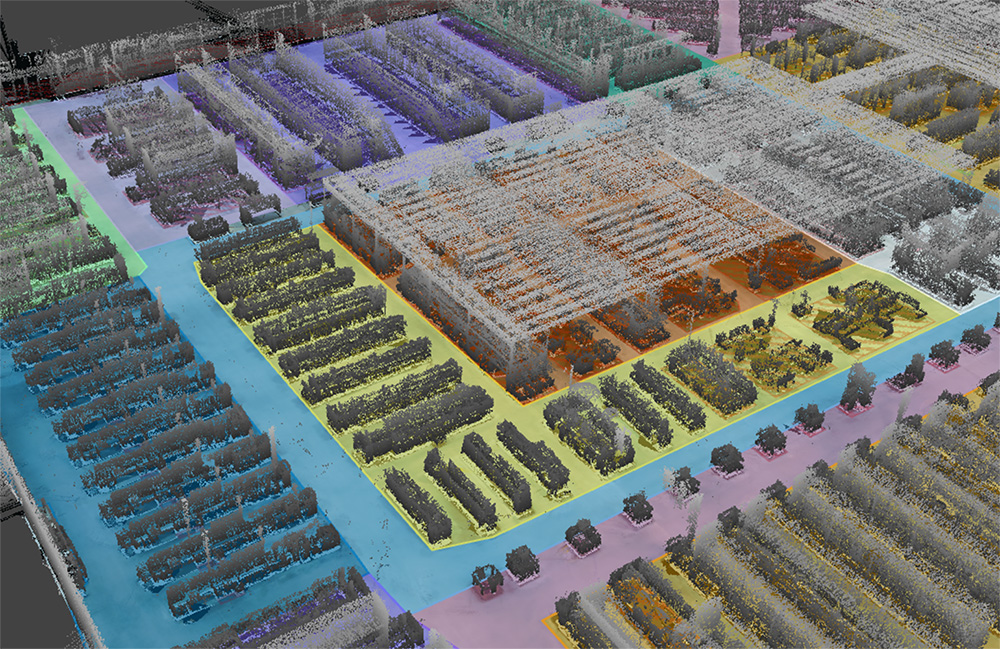
同時位置推定・地図作成、すなわち SLAM は、ロボットが固定された産業用セルから動的な空間へ移行するのを助け、移動しながら地図を作成・更新できるようにした。提携先が示す次の段階は、それらの地図により大きな意味論的・文脈的深さを与えることだ。つまり、幾何だけでなく理解へ進むことを意味する。単なる廊下ではなく、人や障害物、作業フロー、変化する運用ルールがある廊下だ。
ソースは、このコンテクスチュアル・グラウンディング層を、ロボット、ドローン、自動運転車を支えうる知的なデジタル表現だと説明している。期待される成果は、人間と共有する物理環境で高度な AI システムが直感的かつ安全に反応できるほど強い状況認識だ。
研究の背後にある商業的課題
この方向性が魅力的なのは実用性があるからだ。多くのロボティクスの失敗は、実験室で物体を認識できないから起きるのではない。現実空間が乱雑で、再構成可能で、社会的に複雑だから起こる。棚は動き、台車が現れ、人が流れを中断し、照明条件も変わる。画像を分類できても、その情報を持続的な空間文脈に結び付けられないロボットは、信頼しにくい。
Brain Corp の運用規模は、このプロジェクトに現実の展開背景を与えている。ソースによれば、同社は世界中で 50,000 台以上のロボットを展開しており、研究プロトタイプだけでなく、導入済みの基盤から取り組んでいることを意味する。これは、提携が学術的なベンチマークではなく、商業的に意義のある自律性を目指していることを示しているため重要だ。
フィジカル AI における中間の道
この協力は、ロボティクス戦略におけるより大きな変化も反映している。業界は、壊れやすいタスク特化型自動化と、過度に野心的な汎用 AI の間にある中間の道をますます探している。コンテクスチュアルマッピングは、その中間層の有力候補だ。構造と安全性を保ちながら、その上でより柔軟な振る舞いを可能にできる。
このアプローチが基盤になるかどうかは実装次第であり、とりわけ、これらのより豊かな地図がどれだけ拡張し、更新され、急速に進化する AI モデルと統合できるかにかかっている。しかし核心的な考え方は筋が通っている。ロボティクスにおける知能は、見ることだけではない。知覚を世界の安定したモデルに結び付けることでもある。Brain Corp と UC San Diego は、この層こそが、モデルの単純な巨大化だけではなく、次世代の自律システムを管理された環境の外へ展開可能にする鍵かもしれないと賭けている。
この記事は The Robot Report の報道に基づいています。元記事を読む。
Originally published on therobotreport.com
