GPS निशाना बनता जा रहा है
ड्रोन अब ऐसे वातावरणों में काम कर रहे हैं जहाँ GPS को निश्चित मानकर नहीं चला जा सकता। Breaking Defense के स्रोत पाठ में, जिसे Vantor ने प्रस्तुत किया है, बताया गया है कि जामिंग और स्पूफिंग टूल्स अब सस्ते, अधिक सुलभ और तैनात करने में आसान हो रहे हैं। बिना मानव चालक वाले विमानों के लिए यह एक सीधी मिशन समस्या पैदा करता है: भरोसेमंद पोज़िशनिंग के बिना ड्रोन रास्ते से भटक सकते हैं, काम पूरा नहीं कर सकते, या उन्हें इंटरसेप्ट करना आसान हो सकता है।
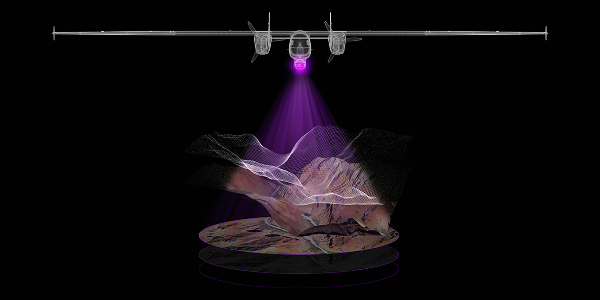
प्रस्तावित समाधान 3D विज़न-आधारित नेविगेशन है। केवल सैटेलाइट सिग्नल पर निर्भर रहने के बजाय, ड्रोन अपने ऑनबोर्ड कैमरों और उच्च-रिज़ॉल्यूशन मैप डेटा का उपयोग करके वास्तविक समय में जो देखता है, उसकी तुलना भूभाग के ज्ञात प्रतिनिधित्व से करता है। यदि मिलान सटीक है, तो GPS बाधित या कमज़ोर होने पर भी ड्रोन नेविगेट करना जारी रख सकता है।
पूर्ण स्थिति निर्धारण बनाम डेड रेकनिंग
स्रोत absolute positioning के महत्व पर ज़ोर देता है: किसी विशेष क्षण में ड्रोन ठीक कहाँ है, यह जानना। GPS उपलब्ध होने पर यह सीधे देता है। इसके बिना, कई सिस्टम relative positioning पर लौटते हैं, जहाँ वे पिछले ज्ञात स्थान से, ऑनबोर्ड मापों के आधार पर, गति का अनुमान लगाते हैं। यह तरीका जल्दी बिगड़ सकता है क्योंकि छोटी-छोटी त्रुटियाँ समय के साथ जुड़ती जाती हैं।
स्रोत में Vantor के Raptor products के senior director के रूप में पहचाने गए Paul Millhouse इस समस्या को इस तरह बताते हैं: GPS चले जाने के बाद सिस्टम को यह पता हो सकता है कि वह कहाँ था, लेकिन यह नहीं कि वह अभी ठीक कहाँ है। दूरी और समय के साथ यह अनिश्चितता बढ़ती जाती है। सैन्य, लॉजिस्टिक्स और reconnaissance मिशनों के लिए, यह स्थानिक त्रुटि सफलता और विफलता के बीच अंतर बन सकती है।
3D टेर्रेन क्यों महत्वपूर्ण है
विज़न-आधारित नेविगेशन संदर्भ डेटा पर निर्भर करता है। ड्रोन को अपने आसपास के भूभाग का एक विश्वसनीय मॉडल चाहिए, ताकि वह लाइव कैमरा इनपुट को मैप से मिला सके। स्रोत Vantor के Raptor समाधान को दशकों के वैश्विक मैपिंग के उपयोग के रूप में वर्णित करता है, जो वास्तविक समय पोज़िशनिंग के लिए एक 3D संदर्भ परत देता है।
3D पहलू महत्वपूर्ण है क्योंकि कम ऊँचाई पर उड़ने वाले बिना मानव चालक वाले विमान दुनिया को सपाट इमेजरी की तरह नहीं देखते। भूभाग का आकार, ऊँचाई, संरचनाएँ, रिजलाइन और अन्य विशेषताएँ सिस्टम को खुद को स्थानीयकृत करने में मदद कर सकती हैं। Raptor की sales head Kara Kramer कहती हैं कि सिस्टम सपाट 2D इमेज की व्याख्या करने के बजाय भूभाग को समझ रहा है।
काउंटर-ड्रोन दबाव बढ़ रहा है
नेविगेशन की चुनौती ड्रोन और काउंटर-ड्रोन सिस्टम्स के बीच एक व्यापक प्रतिस्पर्धा का हिस्सा है। जैसे-जैसे ड्रोन सस्ते और अधिक व्यापक होते जा रहे हैं, विरोधियों के पास उनकी गाइडेंस प्रणालियों पर हमला करने की अधिक प्रेरणा है। स्रोत बताता है कि एक अकेला जैमर या स्पूफर एक क्षेत्र में नेविगेशन बाधित कर सकता है, जिससे साफ़ सैटेलाइट सिग्नल पर निर्भर सिस्टम प्रभावित हो सकते हैं।
यह खास तौर पर विवादित सैन्य परिस्थितियों में प्रासंगिक है, लेकिन दूरस्थ और अवसंरचना-गरीब वातावरणों पर भी लागू होता है जहाँ GPS कवरेज असंगत या कमज़ोर हो सकती है। स्रोत इसे tyranny of distance कहता है: लंबी दूरी पर भरोसेमंद पोज़िशनिंग के बिना काम करना।
वाणिज्यिक और सैन्य ओवरलैप
लेख रक्षा उपयोग मामलों के आसपास है, लेकिन मूल समस्या व्यापक है। लॉजिस्टिक्स ड्रोन, निरीक्षण विमान, आपदा-प्रतिक्रिया प्रणालियाँ और स्वायत्त प्लेटफ़ॉर्म सभी को मज़बूत पोज़िशनिंग चाहिए। कोई भी मिशन जो बिना मानव चालक वाले सिस्टम को ऐसी जगह भेजता है जहाँ इंसानों के लिए जाना असुरक्षित या अव्यावहारिक हो, वह तब अधिक नाज़ुक हो जाता है जब नेविगेशन एक ही बाहरी सिग्नल पर निर्भर हो।
3D विज़न-आधारित नेविगेशन आवश्यक नहीं कि GPS को पूरी तरह बदल दे। अधिक यथार्थवादी संरचना GPS उपलब्ध होने पर उसका उपयोग करती है और न होने पर विज़न के साथ उसे क्रॉस-चेक या प्रतिस्थापित करती है। ऐसा layered approach autonomy में आम है: कई सेंसर और संदर्भ प्रणालियाँ किसी एक इनपुट पर निर्भरता कम करती हैं।
सीमाएँ और खुले प्रश्न
स्रोत एक sponsored piece है और Vantor के Raptor उत्पाद पर केंद्रित है, इसलिए इसके दावों को कंपनी-समर्थित दृष्टिकोण के रूप में पढ़ना चाहिए, न कि स्वतंत्र तुलनात्मक परीक्षण के रूप में। दिए गए पाठ में benchmark डेटा, field trial परिणाम, त्रुटि दर, compute requirements, या मौसम और दृश्यता की सीमाओं के तहत प्रदर्शन संबंधी जानकारी नहीं दी गई है।
ये गायब विवरण महत्वपूर्ण हैं। कैमरा-आधारित नेविगेशन अँधेरे, धुएँ, बर्फ़, फीचर-रहित भूभाग, मैप की ताज़गी, सेंसर गुणवत्ता, और ऑनबोर्ड प्रोसेसिंग सीमाओं से प्रभावित हो सकता है। उच्च-रिज़ॉल्यूशन 3D मैप्स को भी उन क्षेत्रों के लिए बनाए रखना और उपलब्ध कराना पड़ता है जहाँ ड्रोन काम करते हैं। अवधारणा की ताकत इस बात पर निर्भर करती है कि इन व्यावहारिक सीमाओं को कितनी अच्छी तरह संभाला जाता है।
आगे की दिशा
इन सावधानियों के बावजूद, रणनीतिक बदलाव साफ़ है। जैसे-जैसे GPS हस्तक्षेप तैनात करना आसान हो रहा है, autonomy सिस्टम्स को ऐसी पोज़िशनिंग विधियों की ज़रूरत है जो अशुद्ध radio-frequency वातावरणों में भी उपयोगी बनी रहें। 3D विज़न-आधारित नेविगेशन सबसे ठोस रास्तों में से एक है, क्योंकि यह भौतिक दुनिया को ही संदर्भ के रूप में उपयोग करता है।
ज़मीन के करीब उड़ने वाले ड्रोन के लिए, भूभाग पृष्ठभूमि नहीं है। वह एक नेविगेशनल संकेत है। सिस्टम उस संकेत को जितनी सटीकता से पढ़ पाएँगे, वे उन सैटेलाइट्स पर उतने ही कम निर्भर होंगे जिन्हें विरोधी jam या spoof कर सकते हैं।
यह लेख Breaking Defense की रिपोर्टिंग पर आधारित है। मूल लेख पढ़ें.
Originally published on breakingdefense.com