El Desafío de Ingeniería de Moverse como un Humano
Los músculos humanos no funcionan de forma aislada. Cada movimiento implica decenas de músculos que se coordinan en secuencias precisas, con músculos individuales que contribuyen perfiles de fuerza diferentes en diferentes puntos de un movimiento. Este enfoque distribuido y coordinado del movimiento es lo que le da al movimiento humano y animal su calidad fluida y adaptativa — y es lo que ha hecho que replicar ese movimiento en máquinas sea tan difícil.
La actuación robótica tradicional se basa en motores y servos que producen movimiento desde unidades de accionamiento discretas y centralizadas. Estos sistemas son excelentes para tareas industriales precisas y repetitivas, pero producen movimiento que se siente mecánico precisamente porque lo es: unos pocos motores haciendo el trabajo en lugar de una red distribuida de muchos actuadores trabajando juntos.
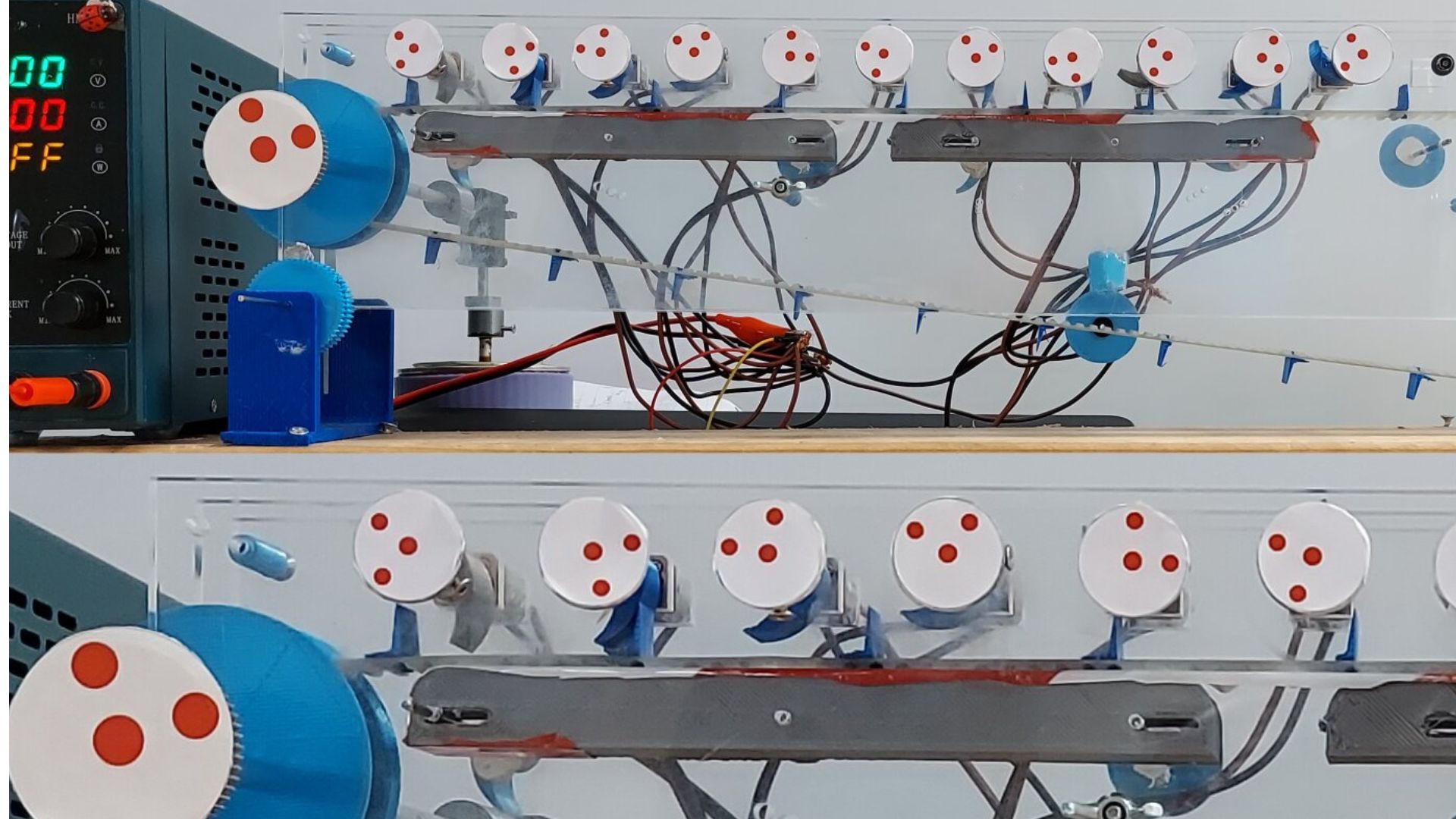
Investigadores de la Universidad de Bristol han adoptado un enfoque diferente. Su sistema de motores artificiales consta de una red de motores mecánicos simples cuyo comportamiento colectivo emerge de sus interacciones en lugar del control centralizado. El resultado es un movimiento que imita estrechamente la dinámica distribuida de los sistemas musculares biológicos.
Cómo Funciona el Sistema
La red de motores de Bristol se construye alrededor de actuadores individuales relativamente simples — similares en principio a las unidades de motor que componen los músculos biológicos. Cada actuador individual es limitado en sus capacidades, pero cuando se interconecta en una red, el sistema en su conjunto produce comportamientos que ningún actuador individual podría generar.
Esto refleja la arquitectura del músculo biológico. Una fibra muscular humana puede contraerse o relajarse, pero la salida de fuerza graduada y el movimiento suave que experimentamos proviene del reclutamiento de diferentes números de fibras en diferentes momentos. El sistema de Bristol aplica este principio a actuadores mecánicos, utilizando interacciones de red en lugar de unidades individuales complejas para producir comportamientos colectivos sofisticados.
En lugar de programar trayectorias precisas y perfiles de fuerza de forma centralizada, los controladores pueden emitir comandos de nivel superior y permitir que la dinámica de la red maneje los detalles de coordinación. Esto es más robusto a cargas inesperadas y variaciones ambientales que los enfoques de control tradicionales.

Aplicaciones en Robótica Blanda
La robótica blanda — robots hechos de materiales conformables en lugar de estructuras rígidas — se ha convertido en una de las áreas más activas de investigación en robótica. Los robots blandos pueden interactuar de forma más segura con los humanos, navegar a través de espacios estrechos o irregulares y manipular objetos delicados sin el riesgo de manipuladores rígidos.
El desafío para la robótica blanda ha sido la actuación. La mayoría de los sistemas de actuadores blandos son difíciles de controlar con precisión y tienden a producir movimientos relativamente lentos y limitados. Una red de motores artificiales que pueda coordinar muchos actuadores para movimientos más dinámicos y naturales podría expandir significativamente lo que los robots blandos pueden hacer.
Prótesis y Dispositivos Portátiles
Una de las áreas de aplicación más inmediatas es la prótesis. Las prótesis actuales, incluso los diseños mioeléctricos avanzados, a menudo se sienten mecánicas de formas que frustran a los usuarios. Una prótesis construida según principios de red de motores artificiales podría producir dinámicas de movimiento más naturales y adaptarse más flexiblemente a las cargas y contextos de la vida diaria.
La naturaleza distribuida del control también ofrece ventajas potenciales en robustez — si unidades de actuadores individuales fallan, la red puede compensar, en lugar de que la extremidad completa pierda función. Los dispositivos portátiles de rehabilitación que asisten el movimiento humano representan otra aplicación a corto plazo, particularmente para la recuperación de accidentes cerebrovasculares y la asistencia de movilidad.

El Camino hacia la Implementación
La investigación de Bristol se encuentra en una etapa temprana — demostrando el principio y caracterizando el comportamiento del sistema en lugar de producir dispositivos desplegables. El camino desde la demostración en laboratorio hasta prótesis comerciales o dispositivos portátiles de rehabilitación implica una ingeniería sustancial, aprobación regulatoria y validación clínica.
Pero el concepto subyacente — aplicar principios biológicos de coordinación muscular distribuida a sistemas mecánicos — es lo suficientemente convincente como para que varios grupos de investigación y empresas de dispositivos médicos probablemente lo persigan. Si los robots blandos con redes de motores artificiales eventualmente pueden moverse con algo aproximado a la naturalidad de extremidades biológicas, el rango de tareas que pueden realizar junto a humanos se expandirá dramáticamente.
Este artículo se basa en reportajes de Interesting Engineering. Lee el artículo original.
Originally published on interestingengineering.com