GPS Wird Zu Einem Ziel
Drohnen operieren zunehmend in Umgebungen, in denen GPS nicht als selbstverständlich gelten kann. Der Breaking-Defense-Quelltext, präsentiert von Vantor, beschreibt, wie Stör- und Spoofing-Werkzeuge billiger, zugänglicher und einfacher einzusetzen werden. Für unbemannte Luftfahrzeuge schafft das ein direktes Missionsproblem: Ohne verlässliche Positionsbestimmung können Drohnen von ihrer Route abkommen, Aufgaben nicht abschließen oder leichter abgefangen werden.
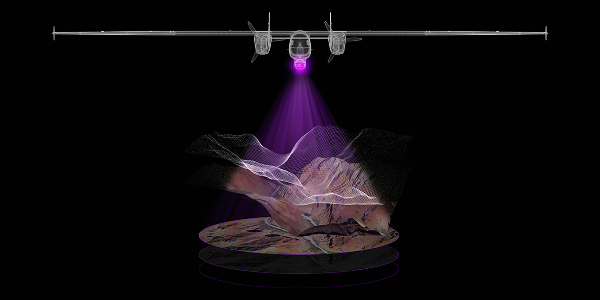
Die vorgeschlagene Antwort ist eine 3D-visionsbasierte Navigation. Statt sich ausschließlich auf Satellitensignale zu verlassen, nutzt eine Drohne Bordkameras und hochauflösende Kartendaten, um das, was sie in Echtzeit sieht, mit einer bekannten Darstellung des Geländes zu vergleichen. Ist die Übereinstimmung präzise, kann die Drohne weiter navigieren, selbst wenn GPS verweigert oder beeinträchtigt ist.
Absolute Positionierung Gegen Schätzung Der Bewegung
Die Quelle betont die Bedeutung der absoluten Positionierung: genau zu wissen, wo sich eine Drohne zu einem bestimmten Zeitpunkt befindet. GPS liefert das direkt, wenn es verfügbar ist. Ohne GPS greifen viele Systeme auf relative Positionierung zurück und schätzen die Bewegung anhand des letzten bekannten Standorts mit Bordmessungen. Dieser Ansatz kann sich schnell verschlechtern, weil sich kleine Fehler mit der Zeit aufsummieren.
Paul Millhouse, in der Quelle als Senior Director für Raptor-Produkte bei Vantor bezeichnet, beschreibt das Problem so: Sobald GPS weg ist, weiß das System vielleicht, wo es war, aber nicht genau, wo es ist. Diese Unsicherheit wächst mit Entfernung und Zeit. Für militärische, logistische und Aufklärungsmissionen kann der sich aufaddierende Ortsfehler den Unterschied zwischen Erfolg und Misserfolg ausmachen.
Warum 3D-Gelände Wichtig Ist
Visionsbasierte Navigation hängt von Referenzdaten ab. Eine Drohne braucht ein zuverlässiges Modell des umliegenden Geländes, damit sie Live-Kameradaten mit der Karte abgleichen kann. Die Quelle beschreibt Vantors Raptor-Lösung als Nutzung jahrzehntelanger globaler Kartierung, um eine 3D-Referenzschicht für die Echtzeit-Positionierung bereitzustellen.
Der 3D-Aspekt ist wichtig, weil unbemannte Luftfahrzeuge in niedriger Flughöhe die Welt nicht als flache Bildfläche erleben. Geländeform, Höhe, Bauwerke, Grate und andere Merkmale können einem System helfen, seinen Standort zu bestimmen. Kara Kramer, in der Quelle als Vertriebsleiterin für Raptor bezeichnet, sagt, das System verstehe das Gelände, statt ein flaches 2D-Bild zu interpretieren.
Der Druck Durch Anti-Drohnen-Systeme Nimmt Zu
Die Navigationsherausforderung ist Teil eines breiteren Wettbewerbs zwischen Drohnen und Gegenmaßnahmen gegen Drohnen. Je billiger und verbreiteter Drohnen werden, desto größer ist der Anreiz für Gegner, ihre Leitsysteme anzugreifen. Die Quelle merkt an, dass ein einzelner Störer oder Spoofer die Navigation in einem Gebiet beeinträchtigen kann und damit Systeme treffen kann, die auf saubere Satellitensignale angewiesen sind.
Das ist besonders relevant in umkämpften militärischen Lagen, gilt aber auch für abgelegene und infrastrukturschwache Umgebungen, in denen GPS-Abdeckung unbeständig oder verwundbar sein kann. Die Quelle nennt das die Tyrannei der Entfernung: über lange Strecken ohne verlässliche Positionierung zu operieren.
Kommerzielle Und Militärische Überschneidung
Der Artikel ist auf Verteidigungsanwendungen ausgerichtet, doch das zugrunde liegende Problem ist breiter. Logistikdrohnen, Inspektionsflugzeuge, Systeme für die Katastrophenhilfe und autonome Plattformen brauchen allesamt robuste Positionierung. Jede Mission, die ein unbemanntes System an einen für Menschen unsicheren oder unpraktischen Ort schickt, wird fragiler, wenn die Navigation von einem einzigen externen Signal abhängt.
3D-Visionsnavigation ersetzt GPS nicht zwangsläufig. Eine realistischere Architektur nutzt GPS, wenn es verfügbar ist, und gleicht es per Vision ab oder ersetzt es, wenn es nicht verfügbar ist. Ein solcher mehrschichtiger Ansatz ist in der Autonomie üblich: Mehrere Sensoren und Referenzsysteme verringern die Abhängigkeit von einer einzigen Eingabe.
Grenzen Und Offene Fragen
Die Quelle ist gesponsert und konzentriert sich auf Vantors Raptor-Produkt, daher sollten ihre Aussagen als Beschreibung eines unternehmensgestützten Ansatzes gelesen werden und nicht als unabhängiger Vergleichstest. Der bereitgestellte Text enthält keine Benchmark-Daten, keine Feldversuchsergebnisse, keine Fehlerraten, keine Rechenanforderungen und keine Angaben zur Leistung unter Wetter- und Sichtbedingungen.
Diese fehlenden Details sind wichtig. Kamerabasierte Navigation kann durch Dunkelheit, Rauch, Schnee, merkmalsarmes Gelände, Kartenaktualität, Sensorqualität und Grenzen der Bordverarbeitung beeinträchtigt werden. Hochauflösende 3D-Karten müssen außerdem gepflegt und für Gebiete verfügbar sein, in denen Drohnen operieren. Die Stärke des Konzepts hängt davon ab, wie gut diese praktischen Einschränkungen gehandhabt werden.
Die Richtung Der Entwicklung
Auch mit diesen Vorbehalten ist die strategische Verschiebung klar. Da sich GPS-Störungen leichter einsetzen lassen, brauchen Autonomiesysteme Positionierungsverfahren, die auch in gestörten Funkumgebungen nützlich bleiben. 3D-Visionsnavigation ist einer der konkreteren Wege, weil sie die physische Welt selbst als Referenz nutzt.
Für Drohnen, die nahe am Boden operieren, ist das Gelände kein Hintergrund. Es ist ein Navigationssignal. Je genauer Systeme dieses Signal lesen können, desto weniger sind sie von Satelliten abhängig, die Gegner stören oder spoofen können.
Dieser Artikel basiert auf einer Berichterstattung von Breaking Defense. Zum Originalartikel.
Originally published on breakingdefense.com