GPS এখন লক্ষ্যবস্তু
ড্রোন এখন এমন পরিবেশে কাজ করছে যেখানে GPS-কে নিশ্চিন্তে ধরা যায় না। Breaking Defense-এর সোর্স টেক্সট, যা Vantor উপস্থাপন করেছে, জানায় যে জ্যামিং ও স্পুফিং টুল এখন আরও সস্তা, সহজলভ্য এবং সহজে স্থাপনযোগ্য হচ্ছে। মানববিহীন উড়োজাহাজের জন্য এটি একটি সরাসরি মিশন সমস্যা তৈরি করে: নির্ভরযোগ্য অবস্থান না থাকলে ড্রোন পথ হারাতে পারে, কাজ শেষ করতে ব্যর্থ হতে পারে, বা তাদের বাধা দেওয়া সহজ হতে পারে।
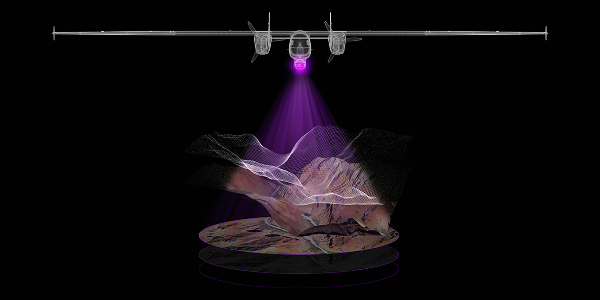
প্রস্তাবিত সমাধান হল 3D vision-based navigation। কেবল স্যাটেলাইট সিগনালের ওপর নির্ভর না করে, ড্রোন তার অনবোর্ড ক্যামেরা এবং উচ্চ-রেজোলিউশনের ম্যাপ ডেটা ব্যবহার করে বাস্তবে যা দেখছে, তার সঙ্গে ভূখণ্ডের একটি পরিচিত উপস্থাপনার তুলনা করে। মিল সঠিক হলে, GPS বন্ধ বা দুর্বল হলেও ড্রোন নেভিগেশন চালিয়ে যেতে পারে।
Absolute Positioning বনাম Dead Reckoning
সোর্স absolute positioning-এর গুরুত্ব জোর দেয়: একটি নির্দিষ্ট মুহূর্তে ড্রোন ঠিক কোথায় আছে তা জানা। GPS পাওয়া গেলে এটি সরাসরি দেয়। তা না থাকলে, অনেক সিস্টেম relative positioning-এ ফিরে যায়, যেখানে শেষ জানা অবস্থান থেকে অনবোর্ড পরিমাপের ভিত্তিতে চলাচল অনুমান করা হয়। ছোট ছোট ত্রুটি সময়ের সঙ্গে জমতে থাকায় এই পদ্ধতি দ্রুত দুর্বল হয়ে যেতে পারে।
সোর্সে Vantor-এর Raptor products-এর senior director হিসেবে চিহ্নিত Paul Millhouse সমস্যাটি এভাবে ব্যাখ্যা করেছেন: GPS চলে গেলে সিস্টেম হয়তো জানে সে কোথায় ছিল, কিন্তু ঠিক কোথায় আছে তা জানে না। দূরত্ব ও সময় বাড়ার সঙ্গে সঙ্গে এই অনিশ্চয়তা বেড়ে যায়। সামরিক, লজিস্টিকস, এবং reconnaissance মিশনের ক্ষেত্রে, জমতে থাকা অবস্থানগত ত্রুটি সাফল্য ও ব্যর্থতার মধ্যে পার্থক্য গড়তে পারে।

3D ভূখণ্ড কেন গুরুত্বপূর্ণ
Vision-based navigation রেফারেন্স ডেটার ওপর নির্ভর করে। ড্রোনের আশপাশের ভূখণ্ডের একটি নির্ভরযোগ্য মডেল দরকার, যাতে সে লাইভ camera input-কে ম্যাপের সঙ্গে মেলাতে পারে। সোর্স Vantor-এর Raptor সমাধানকে দশকের পর দশক ধরে সংগৃহীত global mapping ব্যবহার করে real-time positioning-এর জন্য 3D reference layer দেওয়ার ব্যবস্থা হিসেবে বর্ণনা করে।
3D দিকটি গুরুত্বপূর্ণ, কারণ নিচুতে উড়ে চলা মানববিহীন উড়োজাহাজ পৃথিবীকে সমতল চিত্রের মতো দেখে না। ভূখণ্ডের আকার, উচ্চতা, কাঠামো, ridgelines, এবং অন্যান্য বৈশিষ্ট্য একটি সিস্টেমকে নিজেকে localize করতে সাহায্য করতে পারে। Raptor-এর sales head Kara Kramer বলেন, সিস্টেমটি সমতল 2D image ব্যাখ্যা করার বদলে ভূখণ্ড বোঝে।
Counter-drone চাপ বাড়ছে
নেভিগেশন চ্যালেঞ্জটি ড্রোন এবং counter-drone সিস্টেমের মধ্যে বৃহত্তর প্রতিযোগিতার অংশ। ড্রোন যত সস্তা ও ব্যাপক হচ্ছে, প্রতিপক্ষের জন্য তাদের guidance systems-এ আঘাত করার প্রণোদনাও তত বাড়ছে। একটি jammer বা spoofer একাই একটি এলাকাজুড়ে নেভিগেশন ব্যাহত করতে পারে, ফলে পরিষ্কার স্যাটেলাইট সিগনালের ওপর নির্ভরশীল সিস্টেম প্রভাবিত হয়।
এটি বিশেষ করে contested military পরিস্থিতিতে প্রাসঙ্গিক, তবে দূরবর্তী এবং infrastructure-poor পরিবেশেও প্রযোজ্য, যেখানে GPS coverage অসংগত বা দুর্বল হতে পারে। সোর্স এটিকে tyranny of distance বলেছে: নির্ভরযোগ্য অবস্থান ছাড়া দীর্ঘ দূরত্বে কাজ করা।
বাণিজ্যিক ও সামরিক ওভারল্যাপ
প্রবন্ধটি প্রতিরক্ষা ব্যবহারের উদাহরণকে কেন্দ্র করে লেখা, কিন্তু মূল সমস্যাটি আরও বিস্তৃত। logistics drones, inspection aircraft, disaster-response systems, এবং autonomous platforms সবারই resilient positioning দরকার। যে কোনো মিশন যা মানববিহীন সিস্টেমকে এমন জায়গায় পাঠায় যেখানে মানুষের জন্য যাওয়া ঝুঁকিপূর্ণ বা অবাস্তব, সেটি নেভিগেশন যদি একটিমাত্র বাহ্যিক সিগনালের ওপর নির্ভর করে তবে আরও নাজুক হয়ে যায়।
3D vision-based navigation GPS-কে অবশ্যই প্রতিস্থাপন করে না। আরও বাস্তবসম্মত কাঠামো GPS পাওয়া গেলে তা ব্যবহার করে এবং না থাকলে vision দিয়ে cross-check বা substitute করে। autonomy-তে এমন layered approach সাধারণ: একাধিক sensors এবং reference systems যেকোনো একক input-এর ওপর নির্ভরতা কমায়।
সীমাবদ্ধতা ও খোলা প্রশ্ন
সোর্সটি sponsored piece, এবং Vantor-এর Raptor product-কেন্দ্রিক; তাই এর দাবিগুলোকে স্বাধীন তুলনামূলক পরীক্ষার বদলে কোম্পানি-সমর্থিত পদ্ধতি হিসেবে পড়া উচিত। দেওয়া লেখায় benchmark data, field trial ফলাফল, error rates, compute requirements, বা আবহাওয়া ও দৃশ্যমানতার সীমায় পারফরম্যান্স সম্পর্কে তথ্য নেই।
এই অনুপস্থিত বিবরণগুলো গুরুত্বপূর্ণ। Camera-based navigation অন্ধকার, ধোঁয়া, তুষার, featureless terrain, map freshness, sensor quality, এবং onboard processing limits-এর কারণে প্রভাবিত হতে পারে। উচ্চ-রেজোলিউশনের 3D maps-ও ড্রোন যেখানে কাজ করে সেই এলাকাগুলোর জন্য নিয়মিত বজায় রাখা ও উপলব্ধ করতে হয়। ধারণাটির শক্তি নির্ভর করে এই বাস্তব সীমাবদ্ধতাগুলো কতটা ভালোভাবে সামলানো যায় তার ওপর।
দিকনির্দেশ
এই সতর্কতাগুলোর পরও কৌশলগত পরিবর্তন পরিষ্কার। GPS interference স্থাপন করা যত সহজ হচ্ছে, autonomy systems-এর ততই এমন positioning পদ্ধতি দরকার যা অগোছালো radio-frequency পরিবেশেও কার্যকর থাকে। 3D vision-based navigation সবচেয়ে দৃঢ় পথগুলোর একটি, কারণ এটি বাস্তব জগতকেই reference হিসেবে ব্যবহার করে।
মাটির কাছাকাছি উড়ে চলা ড্রোনের জন্য ভূখণ্ড ব্যাকগ্রাউন্ড নয়। এটি একটি navigational signal। সিস্টেম সেই সিগনাল যত বেশি নিখুঁতভাবে পড়তে পারবে, তারা তত কম স্যাটেলাইটের ওপর নির্ভর করবে, যেগুলো adversaries jam বা spoof করতে পারে।
এই প্রবন্ধটি Breaking Defense-এর রিপোর্টিং-এর ভিত্তিতে লেখা। মূল প্রবন্ধ পড়ুন.
Originally published on breakingdefense.com