الإدراك كأمان وليس كمجرد أداء
مع انتقال الروبوتات الإنسانية من بيئات البحث إلى النشر التجاري والصناعي، أصبحت الأطر التقنية لكيفية إدراكها والتنقل في العالم بنفس أهمية قدراتها البدنية. في NVIDIA GTC 2026، أظهرت RealSense ملاحة الروبوت الإنساني مع LimX Dynamics، وعرضت معمارية إدراكية تعتبر الأمان قيداً تصميماً أساسياً وليس فكرة متأخرة.
طرح Nadav Orbach، الرئيس التنفيذي لـ RealSense، التحدي بشكل مباشر: تعمل الروبوتات الإنسانية في ثلاثة أبعاد، بجانب الناس، في بيئات تتغير باستمرار. إذا كانت الروبوتات ستعمل بأمان بجانب البشر، فإن الإدراك يحمل مسؤولية تتجاوز المستشعرات الخام. يجب أن تعمل كقشرة بصرية للروبوت، مما يتيح التوضيح الدقيق وتجنب الاصطدام وفهم التضاريس والحركة المستقرة والمتوقعة في البيئات غير المنظمة.
الأساس التقني: CuVSLAM واستشعار العمق
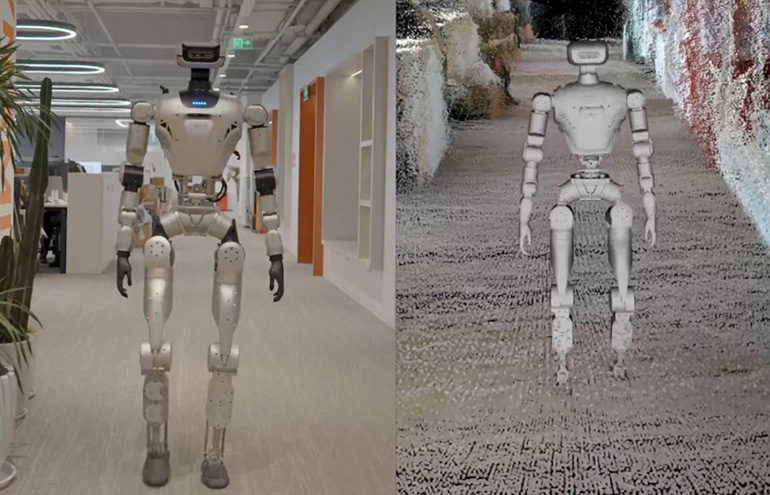
استخدم عرض RealSense كاميرات العمق و CuVSLAM من NVIDIA - مكتبة التوضيح والتعيين المتزامن البصري المسرعة بـ GPU - لتمكين خريطة ثلاثية الأبعاد في الوقت الفعلي والتوضيح على منصة LimX الإنسانية. SLAM هي قدرة أساسية للملاحة المستقلة: تسمح للروبوت ببناء خريطة لبيئته أثناء تتبع موقعه داخل تلك الخريطة في نفس الوقت، دون الاعتماد على البنية التحتية الخارجية مثل GPS أو المنارات المثبتة مسبقاً.
توفر كاميرات العمق بيانات النطاق المطلوبة لإنشاء تمثيلات ثلاثية الأبعاد دقيقة للبيئة، وكشف العوائق على مسافات وارتفاعات مختلفة. بالنسبة لروبوت إنساني ثنائي الأرجل يتنقل في التضاريس المصممة للبشر - بما في ذلك الدرج والمنحدرات والممرات الضيقة والأرضيات المزدحمة - فهم التضاريس ثلاثية الأبعاد الدقيق ضروري للحركة الآمنة. الروبوت الذي يرى فقط في بعدين أو لديه إدراك عمق محدود أكثر عرضة لسوء تقدير العوائق والسقوط أو الاصطدام بالأشخاص والأشياء.
يعمل CuVSLAM من NVIDIA على وحدات Jetson الحسابية الحدودية للشركة، والمدمجة بشكل متزايد في منصات الروبوتات لتوفير قوة الحوسبة اللازمة للمعالجة البصرية في الوقت الفعلي. من خلال تسريع SLAM على أجهزة GPU، يمكن لـ CuVSLAM معالجة بيانات العمق بمعدلات سريعة بما يكفي للبيئات الديناميكية حيث تتغير مواقع الأشخاص والعوائق باستمرار.

الأمر الأماني في التعاون الإنسان والروبوت
يعكس التركيز على الأمان في عرض GTC من RealSense تحولاً أوسع في كيفية اقتراب صناعة الروبوتات من نشر الروبوتات المحمولة القادرة في المساحات المشتركة مع الإنسان. عملت الروبوتات الصناعية تاريخياً في بيئات محاطة بقفص لمنع اصطدام الإنسان بالروبوت. قدمت الروبوتات التعاونية أذرع محدودة القوة يمكنها العمل على مقربة أكبر من الناس. تمثل الروبوتات الإنسانية الخطوة التالية: منصات مصممة للتنقل بحرية عبر البيئات البشرية والتفاعل المحتمل بشكل مباشر مع الناس.
هذا ينشئ نظام أمان مختلف. يجب على روبوت إنساني يتنقل عبر مستودع أو أرضية مصنع أو بيئة البيع بالتجزئة أن يتعامل مع حركة بشرية غير متوقعة وإضاءة متنوعة وأسطح عاكسة تربك مستشعرات العمق وتضاريس قد تتغير بشكل غير متوقع. السقوط محطم بشكل خاص - روبوت إنساني من أي حجم ذي معنى يمكن أن يصيب شخصاً يسقط عليه.
تبدو منصة LimX في عرض RealSense مصممة لمعالجة هذه السيناريوهات من خلال الإدراك المكرر - باستخدام أنماط كاميرا متعددة ومعالجة معجلة بـ GPU للحفاظ على نموذج بيئي موثوق حتى في الظروف التي قد تهزم نظام أقل قدرة.
سياق GTC: دفع Nvidia للروبوتات
عرضت NVIDIA GTC 2026 مجموعة كثيفة بشكل غير عادي من إعلانات الروبوتات، مما يعكس التزام Jensen Huang المعلن بجعل الروبوتات دعامة أعمال رئيسية إلى جانب ذكاء البيانات الاصطناعي. يتم وضع منصة Jetson من Nvidia وكومة Isaac للروبوتات من قبل الشركة كمزود حوسبة مهيمن للأنظمة المستقلة - دور مشابه لما تلعبه الوحدات الرسومية الآن في تدريب الذكاء الاصطناعي والاستدلال.
عرض RealSense-LimX هو مثال على كيفية تمكين Nvidia لنظام بيئي من شركات الروبوتات لبناء أنظمة قادرة على مكدس أجهزتها وبرامجها. من خلال توفير CuVSLAM كمكتبة مدمجة مسبقاً محسّنة لأجهزة Nvidia، تقلل الشركة عبء التطوير على شركات الروبوتات وتوحد طبقة الحوسبة - وهي استراتيجية نجحت بشكل جيد في سوق مركز البيانات الذكي الاصطناعي.
الدلالة الأوسع هي أن ملاحة الروبوت الإنساني تقترب من مستوى نضج حيث يصبح النشر التجاري في البيئات الصناعية المقيدة قابلاً للتطبيق، حيث توفر معمارية إدراكية مركزة على الأمان مثل نهج RealSense البنية التحتية الممكنة. لم يعد السؤال ما إذا كان يمكن للروبوتات التنقل في المساحات البشرية، بل ما إذا كان يمكنها القيام بذلك بموثوقية وأمان كافيين للعمل دون إشراف بشري مستمر.
تم جمع هذه المقالة بناءً على تقارير من The Robot Report. اقرأ المقالة الأصلية.

Originally published on therobotreport.com