联网机器的安全问题正在上移到系统层面
随着自主系统从受控的工业环境走向街道、校园、仓库和社区,最大的问题之一已经不再是单台机器是否能够感知环境,而是当多台机器彼此连接时,能否安全协同工作。据 Interesting Engineering 的一篇报道,一个由美国主导的团队推出了一套旨在让机器人、自动驾驶汽车及相关联网系统网络更安全的框架。
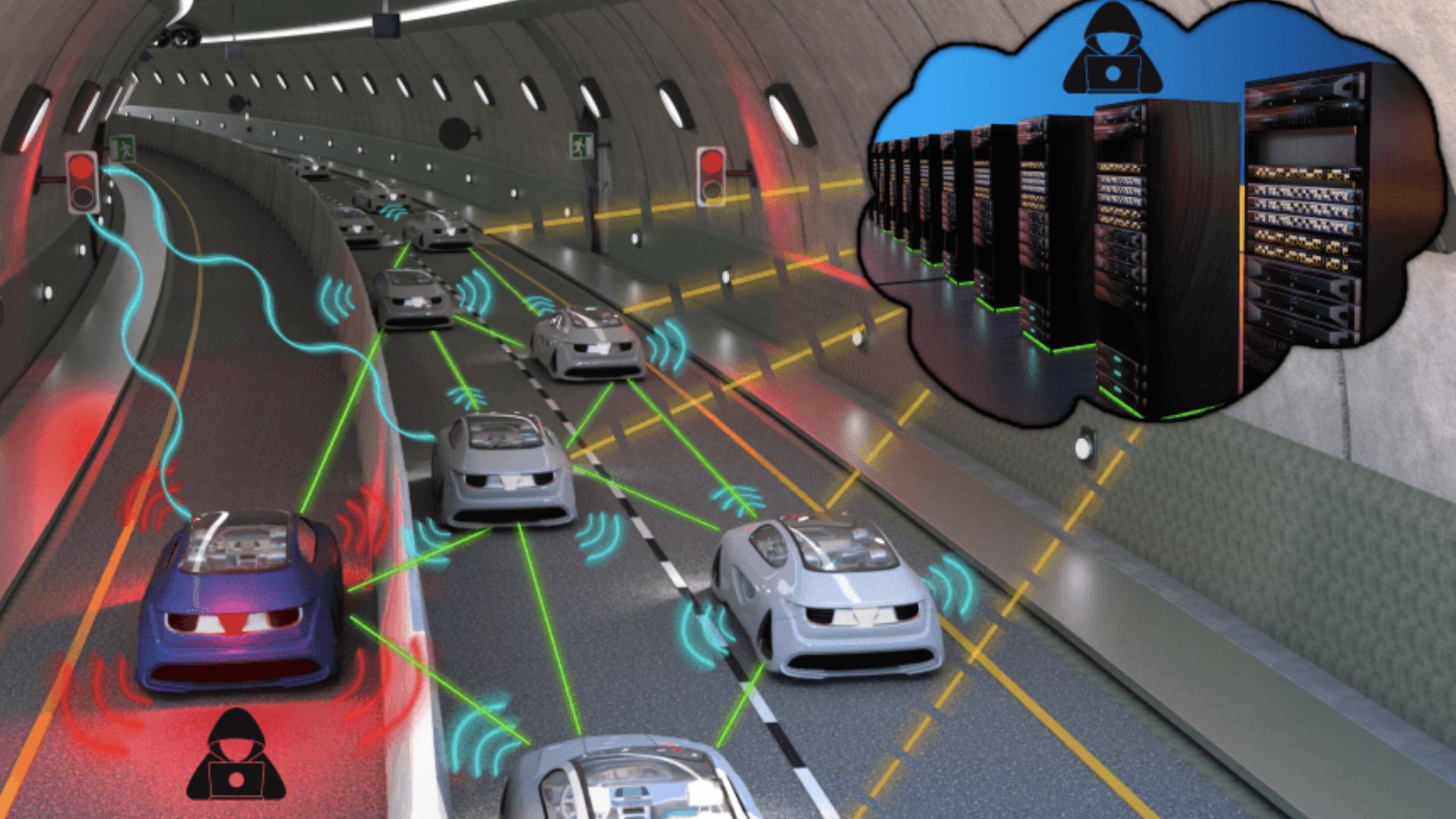
即使从目前有限的候选元数据和摘要来看,重点也很明确:关注的是机器网络的安全,而不是单个孤立设备的安全。这是一个重要区别。自动驾驶车辆或配送机器人的挑战并不会在车载感知和控制结束后终止。一旦多个主体开始共享数据、基于共同信息行动,或依赖其他机器的行为,安全问题就会变成系统级问题。
专为这种环境设计的框架之所以重要,是因为联网自主会产生新的失效模式。机器人即便在局部做出正确决定,如果共享信息存在延迟、不一致,或被网络中的其他机器误解,仍可能促成不安全的整体结果。
为什么网络安全不同
传统安全工程通常从单台机器如何失效、以及如何控制这些失效开始思考。联网自主则需要更广阔的视角。在一个网络化系统中,问题可能会传播。一条错误信号、一个不准确的状态估计,或一条发错时机的指令,都可能同时影响多个主体。结果可能是拥堵、碰撞风险,或整个网络中连锁式的混乱。
因此,一个正式框架可能比渐进式的软件补丁更重要。框架有助于定义系统应如何建模、哪些假设是安全的,以及在部署之前应如何评估交互。在机器人配送、协作式自主和联网车辆生态等新兴领域,这些问题对于从试点走向真实基础设施至关重要。
提到自动驾驶汽车和配送机器人尤为相关。这些系统被要求在有人环境、动态场景中运行,而且往往要在信息不完整的情况下工作。它们的表现不仅取决于感知和规划,也取决于通信、协调和共享规则的可靠性。

从独立自主到协作自主
这一进展也反映了先进出行和机器人领域的更广泛转向。多年来,自主技术工程工作的重点主要是让单个系统更强大。如今,这一领域越来越转向协作式自主,其价值来自多台机器协同工作。这可以提升效率、覆盖范围和响应速度,但也提高了安全治理的风险。
设想一座城市里,配送机器人、自动接驳车、路侧传感器和物流平台彼此交互。此时,安全问题不再只是每个组件是否通过自身测试,而是整个网络在压力、退化或混合交通条件下是否仍能表现可预测。因此,一个旨在解决这一问题的框架,可能对交通、物流、市政技术和工业自动化都具有相关性。
它也可能与监管有关。政策制定者通常比技术部署推进得更慢,尤其是在系统新颖且技术复杂的情况下。安全框架可以为监管者和运营方提供共同语言,帮助明确应该测量什么、应该审计什么,以及在系统被大规模信任之前需要哪些证据。
接下来关注什么
目前提供的候选信息并没有包含该框架的技术细节,因此最稳妥的结论也是最重要的结论:研究人员正在把网络安全视为首要工程问题。这本身就是一个值得注意的进展。
接下来要看的问题是,该框架能否在学术或实验室环境之外发挥作用。对于这一领域的任何方法,真正影响力都取决于开发者、出行运营方、制造商,并最终标准制定机构是否采纳。一个好的框架必须足够具体,能够指导设计决策和测试,同时又足够灵活,适用于不同类型的机器和运行环境。
如果这种平衡能够实现,回报可能相当可观。联网机器人和联网自动驾驶车辆大概率会越来越普遍,而不是越来越少。随着这一趋势发展,公众接受度将取决于安全是否能跟上能力提升的速度。一个帮助组织思考系统级风险的框架,可能会成为让自主技术可靠运作的隐形基础设施的一部分。
这也是为什么这一消息值得关注。它指向一个正在成熟的领域,这个领域开始认识到,自主系统中最棘手的安全问题,也许并不是单台机器出错,而是多台机器同时尝试协同工作时出现的风险。
本文基于 Interesting Engineering 的报道。阅读原文。

Originally published on interestingengineering.com