像人类一样移动的工程挑战
人类肌肉不是孤立工作的。每一个动作都涉及数十块肌肉以精确的顺序协调,在运动的不同阶段,各块肌肉提供不同的力输出。这种分布式、协调的运动方式是赋予人类和动物运动流畅、适应性特征的原因——也正是在机器中复制这种运动如此困难的原因。
传统的机器人驱动依赖于从离散、集中驱动单元产生运动的电动机和伺服器。这些系统在精确、重复的工业任务中表现出色,但它们产生的运动感觉是机械的,正是因为确实如此:少数电动机在做功,而不是许多驱动器共同工作的分布式网络。
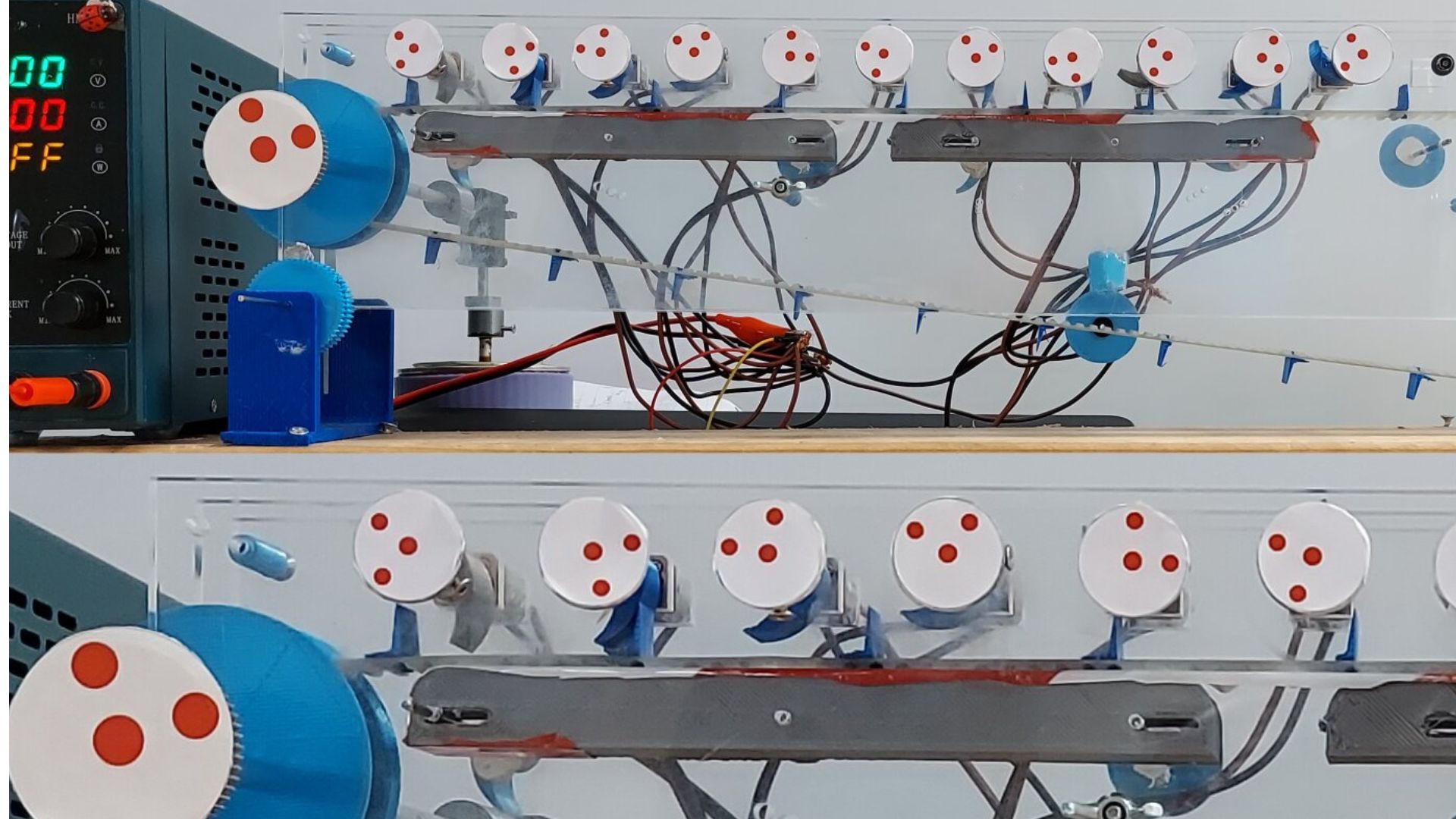
布里斯托尔大学的研究人员采取了不同的方法。他们的人工电动机系统由一个简单机械电动机网络组成,其集体行为来自其相互作用而不是集中控制。结果是运动密切模仿了生物肌肉系统的分布式动力学。
系统如何工作
布里斯托尔电动机网络是围绕相对简单的单个驱动器构建的——在原理上类似于组成生物肌肉的电动机单元。每个单个驱动器的功能受限,但当在网络中互联时,系统整体产生的行为是任何单个驱动器都无法生成的。
这反映了生物肌肉的架构。人类肌肉纤维可以收缩或放松,但我们经历的分级力输出和平滑运动来自于不同时刻不同数量纤维的招募。布里斯托尔系统将这一原理应用于机械驱动器,使用网络相互作用而不是复杂的单个单元来产生复杂的集体行为。
控制器不是编程精确的轨迹和力输出文件集中,而是可以发出高级命令并让网络动力学处理协调细节。这比传统的控制方法对意外负载和环境变化更具鲁棒性。

软机器人中的应用
软机器人——由柔性材料而非刚性结构制成的机器人——已成为最活跃的机器人研究领域之一。软机器人可以更安全地与人类互动,通过紧密或不规则的空间导航,并处理脆弱的物体而不存在刚性操纵器的风险。
软机器人的挑战在于驱动。大多数软驱动器系统很难精确控制,往往产生相对缓慢、有限的运动。能够协调许多驱动器实现更动态、自然运动的人工电动机网络可以显着扩展软机器人的功能。
假肢和可穿戴设备
最直接的应用领域之一是假肢。即使是高级肌电设计的假肢肢体,在许多方面也往往感觉机械,这是用户感到沮丧的原因。基于人工电动机网络原理的假肢可以产生更自然的运动动力学,并更灵活地适应日常生活的负载和环境。
控制的分布式性质也提供了鲁棒性的潜在优势——如果单个驱动器单元失效,网络可以补偿,而不是整个肢体失去功能。可穿戴康复设备辅助人类运动代表了另一个近期应用,特别是用于中风康复和行动辅助。

部署的道路
布里斯托尔的研究处于早期阶段——演示原理并表征系统行为,而不是生产可部署的设备。从实验室演示到商业假肢或康复可穿戴设备的道路涉及大量的工程、监管批准和临床验证。
但基础概念——将分布式肌肉协调的生物原理应用于机械系统——的吸引力足以让几个研究小组和医疗设备公司追求它。如果装备人工电动机网络的软机器人最终能够以接近生物肢体自然度的方式移动,它们在人类身边执行的任务范围将大幅扩展。
本文基于有趣工程公司的报道。阅读原文。
Originally published on interestingengineering.com