感知作为安全,而非仅仅是性能
随着人形机器人从研究环境向商业和工业部署的转变,它们如何感知和导航世界的技术框架与其物理能力一样重要。在NVIDIA GTC 2026上,RealSense展示了与LimX Dynamics的人形机器人导航,展示了一种将安全视为主要设计约束而非事后考虑的感知架构。
RealSense首席执行官Nadav Orbach直接阐述了这一挑战:人形机器人在三维空间中与人在不断变化的环境中运作。如果机器人要与人类安全协作,感知的责任远不止原始传感器。它必须充当机器人的视觉皮层,实现精确定位、碰撞规避、地形理解,以及在非结构化环境中的稳定、可预测的运动。
技术基础:CuVSLAM和深度传感
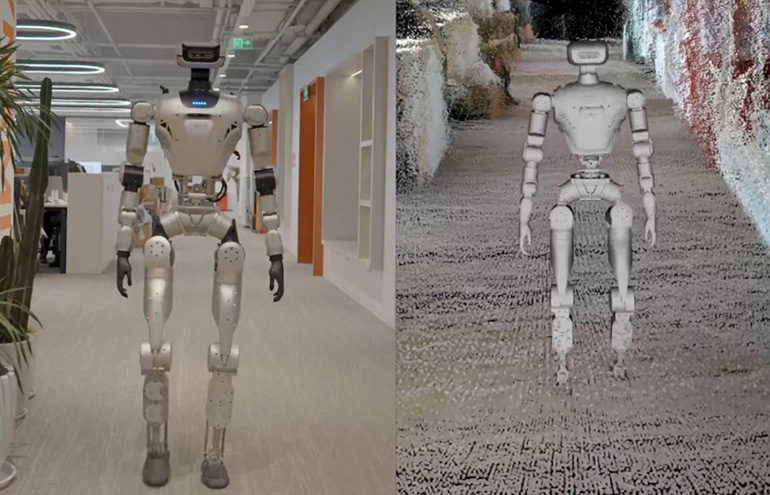
RealSense演示使用深度摄像头和NVIDIA的CuVSLAM——一个GPU加速的视觉同时定位和地图构建库——在LimX人形机器人平台上实现实时3D地图构建和定位。SLAM是自主导航的基础能力:它允许机器人在构建环境地图的同时追踪自身位置,无需依赖GPS或预安装信标等外部基础设施。
深度摄像头提供构建精确3D环境表示所需的范围数据,能检测各种距离和高度的障碍物。对于双足人形机器人在为人类设计的地形中导航——包括台阶、坡道、狭窄通道和杂乱地面——精确的3D地形理解对安全运动至关重要。仅能看到2D或深度感知有限的机器人更容易误判障碍,导致跌倒或与人和物体碰撞。
NVIDIA的CuVSLAM在该公司的Jetson边缘计算模块上运行,这些模块越来越多地嵌入机器人平台,为实时视觉处理提供必要的计算能力。通过在GPU硬件上加速SLAM,CuVSLAM可以以足够快的速率处理深度数据,适应人员和障碍物位置不断变化的动态环境。
人机协作中的安全命令
RealSense在GTC演讲中强调安全反映了机器人业在如何对待在共享人类空间中部署能力强大的移动机器人方面的广泛转变。工业机器人历来在笼式环境中运作以防止人机碰撞。协作机器人引入了力限制机械臂,可在更接近人的地方运作。人形机器人代表了下一步:设计为在人类环境中自由导航并可能直接与人交互的平台。
这创造了不同的安全制度。在仓库、工厂地板或零售环境中移动的人形机器人必须应对不可预测的人员运动、各种光照条件、使深度传感器混淆的反光表面,以及可能意外变化的地形。跌倒特别危险——任何有意义大小的人形机器人跌倒都可能伤害到下面的人。
RealSense演示中的LimX平台似乎设计用于通过冗余感知来解决这些场景——使用多个摄像头模式和GPU加速处理,即使在可能导致低能力系统失败的条件下也能保持可靠的环保模型。
GTC背景:英伟达的机器人推动
NVIDIA GTC 2026展示了异常密集的机器人公告集群,反映了Jensen Huang对使机器人成为与数据中心AI并列的主要业务支柱的承诺。Nvidia的Jetson平台和Isaac机器人堆栈将公司定位为自主系统的主导计算提供商——一个类似于GPU现在在AI训练和推理中所发挥作用的角色。
RealSense-LimX演示是Nvidia如何使能机器人公司生态在其硬件和软件堆栈上构建能力系统的一个例子。通过为Nvidia硬件优化的CuVSLAM作为预构建库提供,该公司减少了机器人公司的开发负担并标准化了计算层——一项在AI数据中心市场中表现良好的策略。
更广泛的含义是,人形机器人导航正在接近成熟度水平,在受限工业环境中的商业部署变得可行,RealSense方法等以安全为重点的感知架构提供了使能基础设施。问题不再是机器人是否能在人类空间中导航,而是它们是否能可靠和安全地做到这一点,以便在没有持续人类监督的情况下运作。
本文基于The Robot Report的报道。阅读原文。

Originally published on therobotreport.com