ABB正将协作机器人推进到更深的工业领域
ABB Robotics推出了一个名为PoWa的新协作机器人家族,将其定位为解决工厂自动化长期存在的空白。传统协作机器人以灵活性和易用性著称,但往往缺乏执行更高要求任务所需的速度和负载能力。传统工业机器人则具备更高性能,但通常更适合规模更大、结构更固定的自动化环境。ABB的新产品线旨在位于这两类产品之间。
公司的判断很直接:市场需求正转向能够在不迫使制造商陷入传统工业机器人复杂性的前提下,完成更重、更快工作的协作系统。ABB表示,全球协作机器人市场到2028年将以每年20%的速度增长,其目标客户既包括刚开始自动化的小型制造商,也包括希望将自动化扩展到此前难以用现有协作机器人平台合理落地的应用中的大型企业。
PoWa为ABB产品线带来了什么
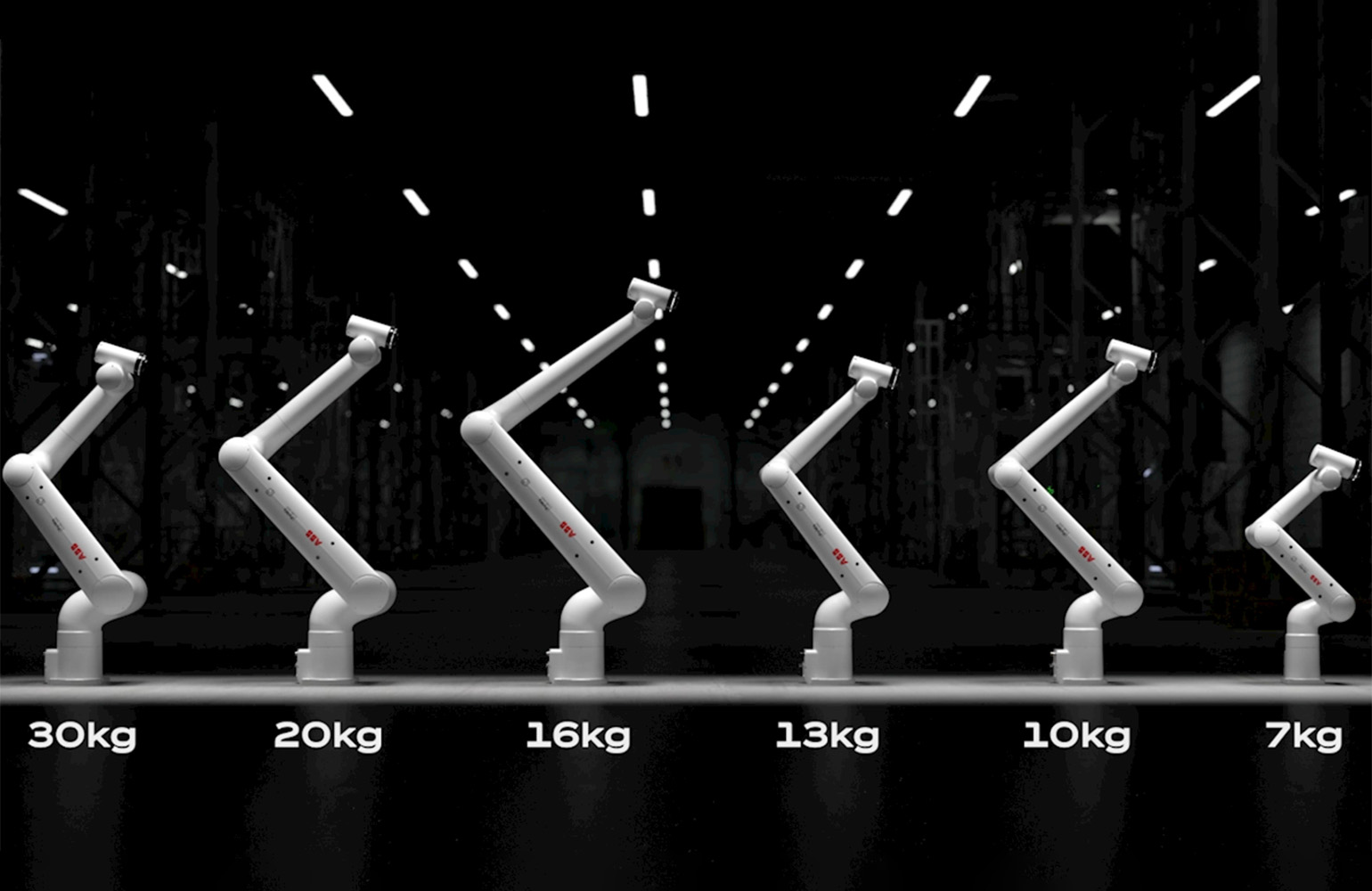
PoWa系列包含六个负载等级,范围从7公斤到30公斤。ABB称,这些机器人最高速度可达每秒5.8米,这一数据凸显出公司强调的是工业级性能,而不仅仅是轻量协作辅助。该产品线专为紧凑环境而设计,说明ABB预计其将在地面空间和布局灵活性与产能同样重要的场景中获得采用。
ABB将高速机床上下料、码垛、拧螺丝和电弧焊列为理想应用。这些场景很能说明公司认为机会所在。它们并不是主要用于展示的演示场景,也不是温和的人机协作用途,而是真正的生产任务,需要循环速度、重复精度,以及足以处理零件和工具的负载能力,这些要求已经超出了许多早期协作机器人的舒适区。
从效果上看,ABB正在尝试扩展协作机器人能做什么的定义。如果PoWa的表现如宣传所述,制造商或许能够在保持协作机器人吸引力的部分特征的同时,自动化更重、更快的流程:紧凑的外形、更易部署以及较低的运行刚性。

易用性主张
ABB也在强调可达性。公司表示,PoWa可以通过机械臂侧面的可编程按钮进行操作,并支持无代码编程。它还兼容第三方配件生态系统。这一易用性层并非附带因素。对许多客户,尤其是刚开始自动化之旅的中小企业来说,采用门槛往往不在于硬件的原始能力,而在于集成负担、专业人员配置和调试时间。
ABB Robotics协作机器人负责人Andrea Cassoni在发布时正是围绕这一张力展开。他表示,客户希望获得更高速度和更大负载,同时也希望保持易用性和紧凑设计。在他的描述中,成熟制造商希望在不继承传统工业机器人部署复杂性的前提下,实现更重、节拍更快的应用自动化。
这一定位反映了当前工业自动化的核心动态之一。许多制造商已经不再处于只在边缘试探自动化的阶段。他们希望系统能够在受限空间和变化中的生产环境里带来可衡量的生产力。因此,一款依然易于编程、却能承担更高要求任务的协作机器人,对实际应用而言具有吸引力,而不仅仅是概念上的吸引力。
这次发布为何对市场重要
协作机器人行业已经成熟到,差异化开始变得更具体。早期增长主要由安全性更高、灵活性更强、能够更接近人类工作的机器人这一广泛吸引力推动。下一阶段很可能由哪些厂商能够把协作系统推进到原本只属于传统机器人的应用中,同时至少保留协作机器人受欢迎的部分部署优势来定义。
ABB推出PoWa正是瞄准这一转变。更高负载、更高速度以及面向特定应用的工业任务,都表明其能力正向高端上移。如果成功,这将扩大在那些缺乏传统大型机器人单元所需场地、预算或流程刚性的工厂中,被视为可行的自动化项目范围。
时机同样值得注意。ABB集团在2025年10月宣布,计划以53亿美元将其机器人业务出售给软银集团。在这样的背景下,新产品发布具有额外分量,因为它们有助于界定该业务的商业与战略画像。ABB Robotics仍然是行业重要参与者,约有7,000名员工,业务组合涵盖工业机器人、协作机器人和自主移动机器人。因此,PoWa并不仅仅是一款小众产品发布,而是公司展示其在一个快速增长细分市场中相关性的重要组成部分。
通向下一波自动化的过渡产品
PoWa背后的核心想法很简单:制造商不应该再像过去那样,被迫在轻量灵活性和重载性能之间做出如此明显的选择。通过打造一个负载最高可达30公斤、速度最高可达每秒5.8米的系列,ABB正试图把协作机器人变成能够胜任更多要求而不仅仅是温和协作的工具。
这并不会消除协作机器人与传统工业机器人之间的界限,但会缩小这条界线。对于在真实工厂空间中推进渐进式自动化的工厂来说,这种缩小可能是此次发布最重要的商业意义。越多任务能够由体积更小、更易使用、同时仍具生产能力的系统来处理,可服务市场就越大。
ABB的观点是,行业已经准备好迈出这一步。PoWa就是它为这一步提供硬件支持的尝试。
本文基于The Robot Report的报道。阅读原文。
Originally published on therobotreport.com