GPS లక్ష్యంగా మారుతోంది
డ్రోన్లు ఇప్పుడు GPSని ఖచ్చితంగా నమ్మలేని వాతావరణాల్లో ఎక్కువగా పనిచేస్తున్నాయి. Breaking Defense మూల పాఠ్యంలో, Vantor అందించినదిగా, జామింగ్ మరియు స్పూఫింగ్ సాధనాలు చౌకగా, మరింత అందుబాటులో, మరియు అమలు చేయడానికి సులభంగా మారుతున్నాయని వివరించింది. మానవరహిత విమానాల కోసం ఇది నేరుగా మిషన్ సమస్యను సృష్టిస్తుంది: నమ్మకమైన స్థానం లేకుండా డ్రోన్లు దారి తప్పవచ్చు, పనులు పూర్తి చేయలేకపోవచ్చు, లేదా వాటిని పట్టుకోవడం సులభమవుతుంది.
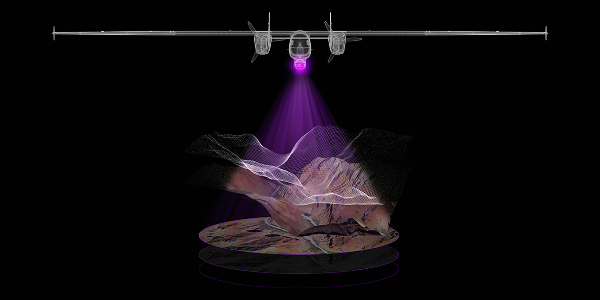
ప్రతిపాదిత పరిష్కారం 3D vision-based navigation. ఉపగ్రహ సంకేతాలపై మాత్రమే ఆధారపడకుండా, డ్రోన్ తన ఆన్బోర్డ్ కెమెరాలు మరియు అధిక-రిజల్యూషన్ మ్యాప్ డేటాను ఉపయోగించి, నిజ సమయంలో అది చూస్తున్న దాన్ని భూభాగానికి సంబంధించిన తెలిసిన ప్రతినిధిత్వంతో పోలుస్తుంది. సరిపోలిక ఖచ్చితంగా ఉంటే, GPS నిరాకరించబడినా లేదా బలహీనమైనా డ్రోన్ నావిగేషన్ కొనసాగించగలదు.
Absolute Positioning వర్సెస్ Dead Reckoning
మూలం absolute positioning ప్రాముఖ్యతను హైలైట్ చేస్తోంది: ఒక నిర్దిష్ట క్షణంలో డ్రోన్ ఖచ్చితంగా ఎక్కడ ఉందో తెలుసుకోవడం. GPS అందుబాటులో ఉన్నప్పుడు ఇది నేరుగా ఇస్తుంది. అది లేకపోతే, అనేక వ్యవస్థలు relative positioningకి వెళ్తాయి, చివరిగా తెలిసిన స్థానం నుండి ఆన్బోర్డ్ కొలతల ఆధారంగా కదలికను అంచనా వేస్తాయి. చిన్న లోపాలు కాలక్రమేణా కూడుకుపోవడం వల్ల ఈ విధానం త్వరగా క్షీణించవచ్చు.
మూలంలో Vantor యొక్క Raptor products senior directorగా గుర్తించబడిన Paul Millhouse ఈ సమస్యను ఇలా వివరించారు: GPS పోయిన తర్వాత, వ్యవస్థకు అది ఎక్కడ ఉందో తెలిసి ఉండవచ్చు, కానీ ఇప్పుడు ఖచ్చితంగా ఎక్కడ ఉందో తెలియదు. దూరం, సమయం పెరిగే కొద్దీ ఆ అనిశ్చితి పెరుగుతుంది. సైనిక, లాజిస్టిక్స్, మరియు reconnaissance మిషన్లకు, కూడుకుపోయే స్థానం లోపం విజయం మరియు వైఫల్యం మధ్య తేడా కావచ్చు.

3D భూభాగం ఎందుకు ముఖ్యమో
Vision-based navigationకి reference data అవసరం. డ్రోన్ తన చుట్టూ ఉన్న భూభాగానికి నమ్మదగిన మోడల్ కావాలి, తద్వారా అది ప్రత్యక్ష camera inputను మ్యాప్తో సరిపోల్చగలదు. మూలం Vantor యొక్క Raptor పరిష్కారాన్ని దశాబ్దాల global mappingను ఉపయోగించి real-time positioning కోసం 3D reference layer అందించేదిగా వివరించింది.
3D అంశం ముఖ్యమైనది, ఎందుకంటే తక్కువ ఎత్తులో ఎగిరే మానవరహిత విమానాలు ప్రపంచాన్ని flat imageryగా అనుభవించవు. భూభాగ ఆకృతి, ఎత్తు, నిర్మాణాలు, ridgelines, మరియు ఇతర లక్షణాలు అన్నీ వ్యవస్థకు తాను ఎక్కడ ఉందో గుర్తించడంలో సహాయపడతాయి. Raptor sales head Kara Kramer, వ్యవస్థ flat 2D imageను అర్థం చేసుకోవడం కంటే భూభాగాన్ని అర్థం చేసుకుంటోందని చెబుతారు.
Counter-drone ఒత్తిడి పెరుగుతోంది
నావిగేషన్ సవాలు డ్రోన్లు మరియు counter-drone వ్యవస్థల మధ్య విస్తృత పోరాటంలో భాగం. డ్రోన్లు చౌకగా, విస్తృతంగా ఉపయోగించబడుతున్న కొద్దీ, ప్రత్యర్థులకు వాటి guidance systemsపై దాడి చేయడానికి మరింత ప్రోత్సాహం ఉంటుంది. ఒక jammer లేదా spoofer ఒక ప్రాంతంలోనే నావిగేషన్ను దెబ్బతీయగలదు, దీని వల్ల శుభ్రమైన ఉపగ్రహ సంకేతాలపై ఆధారపడే వ్యవస్థలు ప్రభావితమవుతాయి.
ఇది ప్రత్యేకంగా contested military వాతావరణాల్లో ప్రాసంగికం, కానీ GPS coverage అస్థిరంగా లేదా బలహీనంగా ఉండే దూరప్రాంతాలు మరియు infrastructure-poor వాతావరణాలకు కూడా వర్తిస్తుంది. మూలం దీనిని tyranny of distance అని పేర్కొంది: నమ్మదగిన స్థానం లేకుండా పొడవైన దూరాల్లో పని చేయడం.
వాణిజ్య మరియు సైనిక పొరపాటు
వ్యాసం రక్షణ వినియోగాల చుట్టూ ఉన్నప్పటికీ, అసలు సమస్య మరింత విస్తృతం. logistics drones, inspection aircraft, disaster-response systems, మరియు autonomous platforms అన్నిటికీ resilient positioning అవసరం. మానవులకు అసురక్షితమైన లేదా ప్రాక్టికల్గా కష్టం ఉన్న ప్రదేశాలకు మానవరహిత వ్యవస్థను పంపే ఏ మిషన్ అయినా, నావిగేషన్ ఒకే బాహ్య సంకేతంపై ఆధారపడితే మరింత బలహీనమవుతుంది.
3D vision-based navigation GPSని తప్పనిసరిగా భర్తీ చేయాల్సిన అవసరం లేదు. మరింత వాస్తవిక నిర్మాణం GPS అందుబాటులో ఉన్నప్పుడు దాన్ని ఉపయోగించి, అది లేనప్పుడు visionతో cross-check లేదా substitute చేస్తుంది. autonomyలో ఇటువంటి layered approach సాధారణం: అనేక sensors మరియు reference systems ఏ ఒక్క inputపై ఆధారపడటాన్ని తగ్గిస్తాయి.
పరిమితులు మరియు తెరిచి ఉన్న ప్రశ్నలు
మూలం sponsored piece, మరియు Vantor యొక్క Raptor productపై కేంద్రీకృతమైంది, కాబట్టి దాని దావాలను స్వతంత్ర పోలిక పరీక్షగా కాకుండా కంపెనీ-మద్దతు పొందిన దృక్పథంగా చదవాలి. ఇచ్చిన పాఠ్యంలో benchmark data, field trial ఫలితాలు, error rates, compute requirements, లేదా వాతావరణం మరియు visibility పరిమితులలో పనితీరు గురించి సమాచారం లేదు.
ఈ వివరాలు ముఖ్యమైనవి. Camera-based navigation చీకటి, పొగ, మంచు, featureless terrain, map freshness, sensor quality, మరియు onboard processing పరిమితుల వల్ల ప్రభావితమవుతుంది. అధిక-రిజల్యూషన్ 3D mapsను కూడా డ్రోన్లు పనిచేసే ప్రాంతాల కోసం కొనసాగిస్తూ నిర్వహించాలి. ఆలోచన బలం ఈ ప్రాక్టికల్ పరిమితులను ఎంత బాగా నిర్వహించగలిగామన్నదానిపై ఆధారపడి ఉంటుంది.

మార్గం ఏ దిశలో ఉంది
ఈ జాగ్రత్తలతోనూ, వ్యూహాత్మక మార్పు స్పష్టంగా ఉంది. GPS interference అమలు చేయడం మరింత సులభమవుతున్నకొద్దీ, autonomy systems dirty radio-frequency వాతావరణాల్లో కూడా ఉపయోగకరంగా ఉండే positioning పద్ధతులు అవసరం. 3D vision-based navigation అత్యంత స్పష్టమైన మార్గాలలో ఒకటి, ఎందుకంటే ఇది physical worldనే referenceగా ఉపయోగిస్తుంది.
భూమికి దగ్గరగా ఎగిరే డ్రోన్లకు, భూభాగం నేపథ్యం కాదు. అది ఒక navigational signal. వ్యవస్థలు ఆ సంకేతాన్ని ఎంత ఖచ్చితంగా చదవగలిగితే, adversaries jam లేదా spoof చేయగల ఉపగ్రహాలపై అవి అంత తక్కువగా ఆధారపడతాయి.
ఈ వ్యాసం Breaking Defense రిపోర్టింగ్ ఆధారంగా ఉంది. మూల వ్యాసాన్ని చదవండి.
Originally published on breakingdefense.com