O GPS Está Virando Um Alvo
Os drones operam cada vez mais em ambientes em que o GPS não pode ser considerado garantido. O texto original da Breaking Defense, apresentado pela Vantor, descreve como as ferramentas de bloqueio e falsificação estão se tornando mais baratas, acessíveis e fáceis de implantar. Para aeronaves não tripuladas, isso cria um problema direto de missão: sem posicionamento confiável, os drones podem sair da rota, não concluir tarefas ou ficar mais fáceis de interceptar.
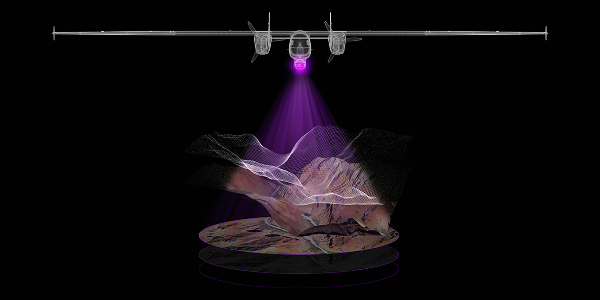
A resposta proposta é a navegação baseada em visão 3D. Em vez de depender apenas de sinais de satélite, um drone usa câmeras a bordo e dados cartográficos de alta resolução para comparar o que vê em tempo real com uma representação conhecida do terreno. Se a correspondência for precisa, o drone pode continuar navegando mesmo quando o GPS estiver negado ou degradado.
Posicionamento Absoluto Versus Navegação Estimada
A fonte enfatiza a importância do posicionamento absoluto: saber exatamente onde um drone está em um determinado momento. O GPS fornece isso diretamente quando está disponível. Sem ele, muitos sistemas recorrem ao posicionamento relativo, estimando o movimento a partir da última localização conhecida usando medições embarcadas. Essa abordagem pode se degradar rapidamente porque pequenos erros se acumulam com o tempo.
Paul Millhouse, identificado na fonte como diretor sênior de produtos Raptor na Vantor, descreve o problema assim: quando o GPS desaparece, o sistema pode saber onde estava, mas não com precisão onde está. Essa incerteza cresce com a distância e o tempo. Para missões militares, logísticas e de reconhecimento, o erro de localização acumulado pode ser a diferença entre sucesso e fracasso.
Por Que O Terreno 3D Importa
A navegação baseada em visão depende de dados de referência. Um drone precisa de um modelo confiável do terreno ao redor para combinar a entrada da câmera ao vivo com o mapa. A fonte descreve a solução Raptor da Vantor como o uso de décadas de mapeamento global para fornecer uma camada de referência 3D para posicionamento em tempo real.
O aspecto 3D é importante porque aeronaves não tripuladas de baixa altitude não experimentam o mundo como uma imagem plana. A forma do terreno, a elevação, as estruturas, as cristas e outros elementos podem ajudar um sistema a se localizar. Kara Kramer, identificada como chefe de vendas do Raptor, diz que o sistema entende o terreno em vez de interpretar uma imagem 2D plana.
A Pressão Antidrone Está Aumentando
O desafio de navegação faz parte de uma disputa mais ampla entre drones e sistemas antidrone. À medida que os drones ficam mais baratos e mais usados, os adversários têm mais incentivo para atacar seus sistemas de orientação. A fonte observa que um único bloqueador ou falsificador pode interromper a navegação em uma área, afetando potencialmente sistemas que dependem de sinais de satélite limpos.
Isso é especialmente relevante em ambientes militares contestados, mas também se aplica a ambientes remotos e com pouca infraestrutura, onde a cobertura de GPS pode ser inconsistente ou vulnerável. A fonte chama isso de tirania da distância: operar por longas distâncias sem posicionamento confiável.
Sobreposição Entre Comercial E Militar
O artigo é enquadrado em casos de uso de defesa, mas o problema subjacente é mais amplo. Drones logísticos, aeronaves de inspeção, sistemas de resposta a desastres e plataformas autônomas precisam de posicionamento resiliente. Qualquer missão que envie um sistema não tripulado para um lugar inseguro ou impraticável para humanos fica mais frágil se a navegação depender de um único sinal externo.
A navegação por visão 3D não necessariamente substitui o GPS. Uma arquitetura mais realista usa GPS quando ele está disponível e faz a verificação cruzada ou a substituição com visão quando não está. Essa abordagem em camadas é comum na autonomia: múltiplos sensores e sistemas de referência reduzem a dependência de uma única entrada.
Limites E Questões Em Aberto
A fonte é patrocinada e se concentra no produto Raptor da Vantor, então suas alegações devem ser lidas como a descrição de uma abordagem apoiada por uma empresa, não como um teste comparativo independente. O texto fornecido não apresenta dados de benchmark, resultados de testes de campo, taxas de erro, requisitos de processamento ou desempenho sob condições de clima e visibilidade.
Esses detalhes ausentes importam. A navegação por câmera pode ser afetada por escuridão, fumaça, neve, terrenos sem características marcantes, atualidade dos mapas, qualidade dos sensores e limites do processamento embarcado. Mapas 3D de alta resolução também precisam ser mantidos e disponibilizados para as áreas onde os drones operam. A força do conceito depende de quão bem essas restrições práticas são tratadas.
A Direção Da Mudança
Mesmo com essas ressalvas, a mudança estratégica é clara. À medida que a interferência em GPS se torna mais fácil de implantar, sistemas autônomos precisam de métodos de posicionamento que continuem úteis em ambientes de radiofrequência contaminados. A navegação por visão 3D é um dos caminhos mais concretos porque usa o próprio mundo físico como referência.
Para drones que operam próximos ao solo, o terreno não é pano de fundo. É um sinal de navegação. Quanto mais precisamente os sistemas puderem ler esse sinal, menos dependerão de satélites que adversários podem bloquear ou falsificar.
Este artigo é baseado na reportagem da Breaking Defense. Leia o artigo original.
Originally published on breakingdefense.com