A robótica subaquática está levando a arqueologia marítima a profundidades cada vez maiores
Um robô operado remotamente mapeou um naufrágio francês do século 16 localizado a mais de 1,5 milha abaixo da superfície, de acordo com os metadados fornecidos pelo candidato do Interesting Engineering. O robô teria capturado 86 mil imagens do local e recuperado artefatos, combinando documentação visual em grande escala com recuperação física em um ambiente muito além do alcance rotineiro do mergulho humano.
Mesmo em versão resumida, os detalhes apontam para a convergência contínua entre robótica, imagem e trabalho de preservação histórica. Um naufrágio a essa profundidade é difícil não apenas de alcançar, mas também de estudar de forma sistemática. A contagem de imagens relatada sugere uma campanha de documentação construída em torno de densidade e precisão, e não de uma simples inspeção rápida. Na prática, é isso que permite que a exploração submarina avance da descoberta simples para a reconstrução e a análise.
Por que a contagem de imagens importa
A cifra de 86 mil imagens chama atenção por si só. O imageamento de alto volume é uma das bases do levantamento remoto moderno porque pode gerar um registro muito mais completo de um local do que a fotografia seletiva. Para arqueólogos e equipes de conservação, um arquivo visual detalhado pode ser tão importante quanto os próprios objetos recuperados. Ele preserva layout, contexto e condição de maneiras que artefatos isolados não conseguem.
Isso se torna especialmente importante no caso de um naufrágio do século 16. Sítios marítimos dessa época são cápsulas do tempo de comércio, tecnologia, guerra e vida cotidiana. Quanto mais detalhadamente um local é documentado antes de sofrer perturbação, maiores são as chances de entender não apenas o que foi encontrado, mas como o naufrágio repousou ali e o que seus materiais podem revelar.
A robótica amplia o acesso onde os mergulhadores não chegam
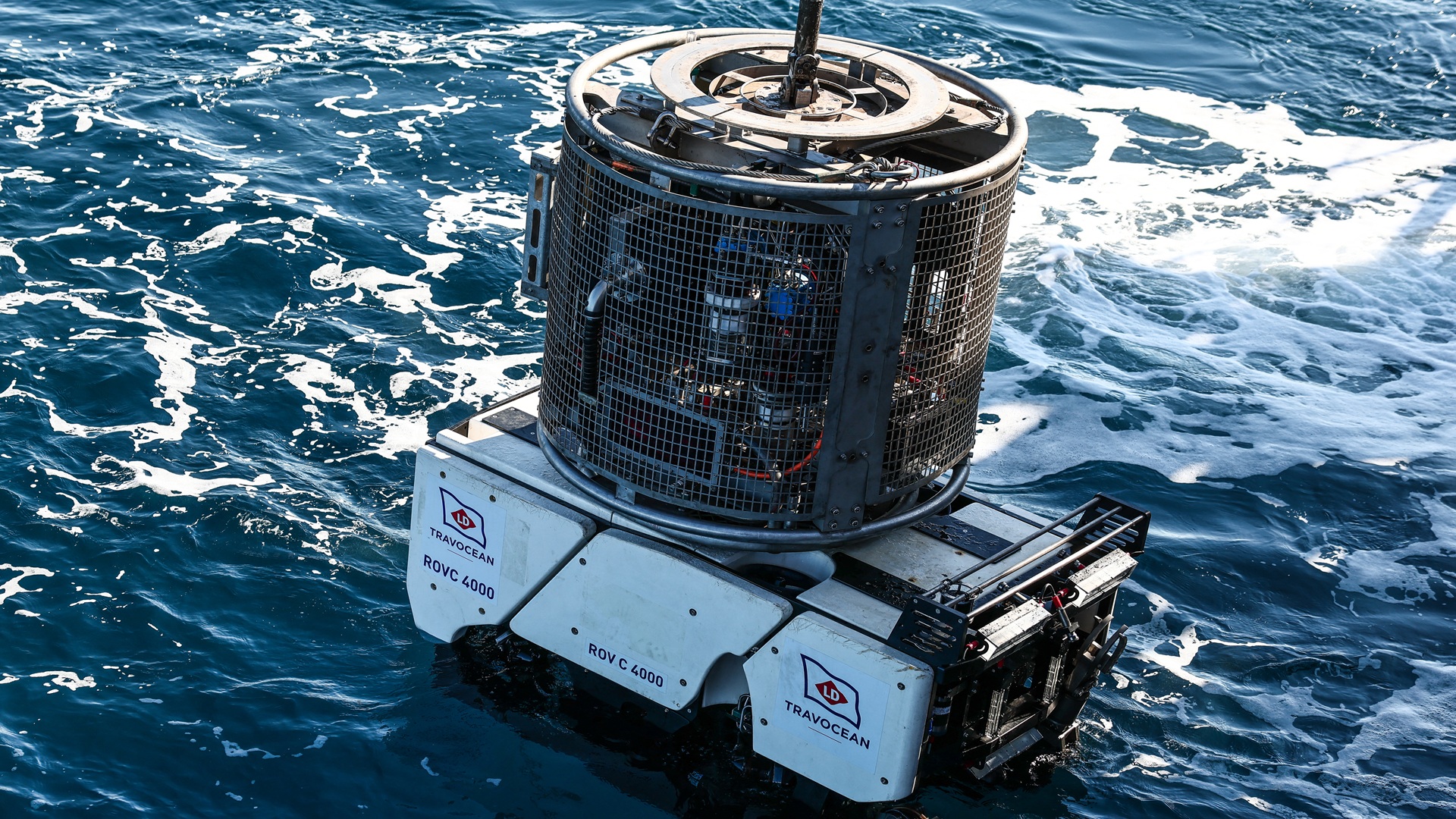
A profundidade no resumo do candidato, mais de 1,5 milha, basta para definir a operação tanto como uma história de robótica quanto de arqueologia. Mergulhadores humanos não podem trabalhar em tais condições. Isso deixa os sistemas operados remotamente ou autônomos responsáveis por observação, navegação e recuperação. Nesse sentido, cada levantamento bem-sucedido em águas ultraprofundas desse tipo amplia a faixa operacional das plataformas robóticas, em vez de produzir apenas mais um conjunto de imagens científicas.
O uso de um robô operado remotamente também reflete um modelo operacional mais amplo, cada vez mais comum em trabalhos em ambientes extremos. Em vez de enviar pessoas para a zona de risco, as equipes constroem sistemas de sensoriamento, controle e manipulação capazes de operar em profundidade enquanto especialistas analisam o fluxo de dados recebido na superfície. Essa abordagem reduz o risco e aumenta a resistência operacional, duas das principais razões pelas quais a robótica subaquática continua se expandindo por ciência, infraestrutura e exploração.
Artefatos e contexto
O resumo do relatório também informa que o robô recuperou artefatos do naufrágio. A recuperação sempre levanta duas perguntas paralelas: quais objetos foram trazidos de volta e que informações contextuais foram preservadas no processo. Como o trecho da fonte fornecida é limitado, o ponto confirmado principal é simplesmente que a missão combinou mapeamento e recuperação. Mesmo essa combinação é significativa. Ela significa que a operação não ficou restrita ao reconhecimento visual e teve capacidade de interagir diretamente com o sítio.
Para quem acompanha inovação, essa interação direta é o sinal técnico mais importante. Sistemas de imagem ajudam a construir entendimento, mas a recuperação exige outra camada de precisão. Agarrar, erguer e transportar objetos de profundidades extremas sem danificá-los é uma tarefa exigente, sobretudo quando os materiais podem ser frágeis e historicamente relevantes.
Um modelo para futuras missões em ambientes extremos
Histórias como esta lembram que a inovação não acontece apenas em laboratórios e centros de dados. Ela também acontece em lugares onde o problema é o próprio acesso. Um robô capaz de documentar em detalhe um naufrágio centenário e recuperar artefatos de mais de 1,5 milha abaixo d'água representa progresso em mobilidade, sensoriamento e manipulação remota ao mesmo tempo.
Isso importa além da história marítima. As mesmas famílias técnicas que viabilizam o trabalho arqueológico em mar profundo costumam influenciar inspeção industrial, operações de energia submarina, monitoramento ambiental e outras missões em que humanos não conseguem ir facilmente. A carga específica desta missão pode ser histórica, mas a lógica da plataforma é contemporânea e amplamente relevante.
No mínimo, o candidato descreve uma missão que realizou três coisas ao mesmo tempo: acesso a profundidade extrema, captura massiva de imagens e recuperação de artefatos. Isso basta para marcá-la como um marco significativo da robótica e como um exemplo útil de como sistemas remotos estão ampliando o que pode ser explorado, registrado e fisicamente recuperado de alguns dos ambientes mais difíceis de alcançar do planeta.
Este artigo é baseado na reportagem do Interesting Engineering. Leia o artigo original.
Originally published on interestingengineering.com