O Desafio da Engenharia de Mover-se Como um Humano
Os músculos humanos não funcionam isoladamente. Todo movimento envolve dezenas de músculos coordenados em sequências precisas, com cada músculo contribuindo com perfis de força diferentes em diferentes pontos de um movimento. Essa abordagem distribuída e coordenada do movimento é o que dá ao movimento humano e animal sua qualidade fluida e adaptativa — e é o que tornou tão difícil replicar esse movimento em máquinas.
A atuação robótica tradicional depende de motores e servos que produzem movimento a partir de unidades de acionamento discretas e centralizadas. Esses sistemas são excelentes para tarefas industriais precisas e repetitivas, mas produzem movimento que parece mecânico porque é: alguns poucos motores fazendo o trabalho em vez de uma rede distribuída de muitos atuadores trabalhando juntos.
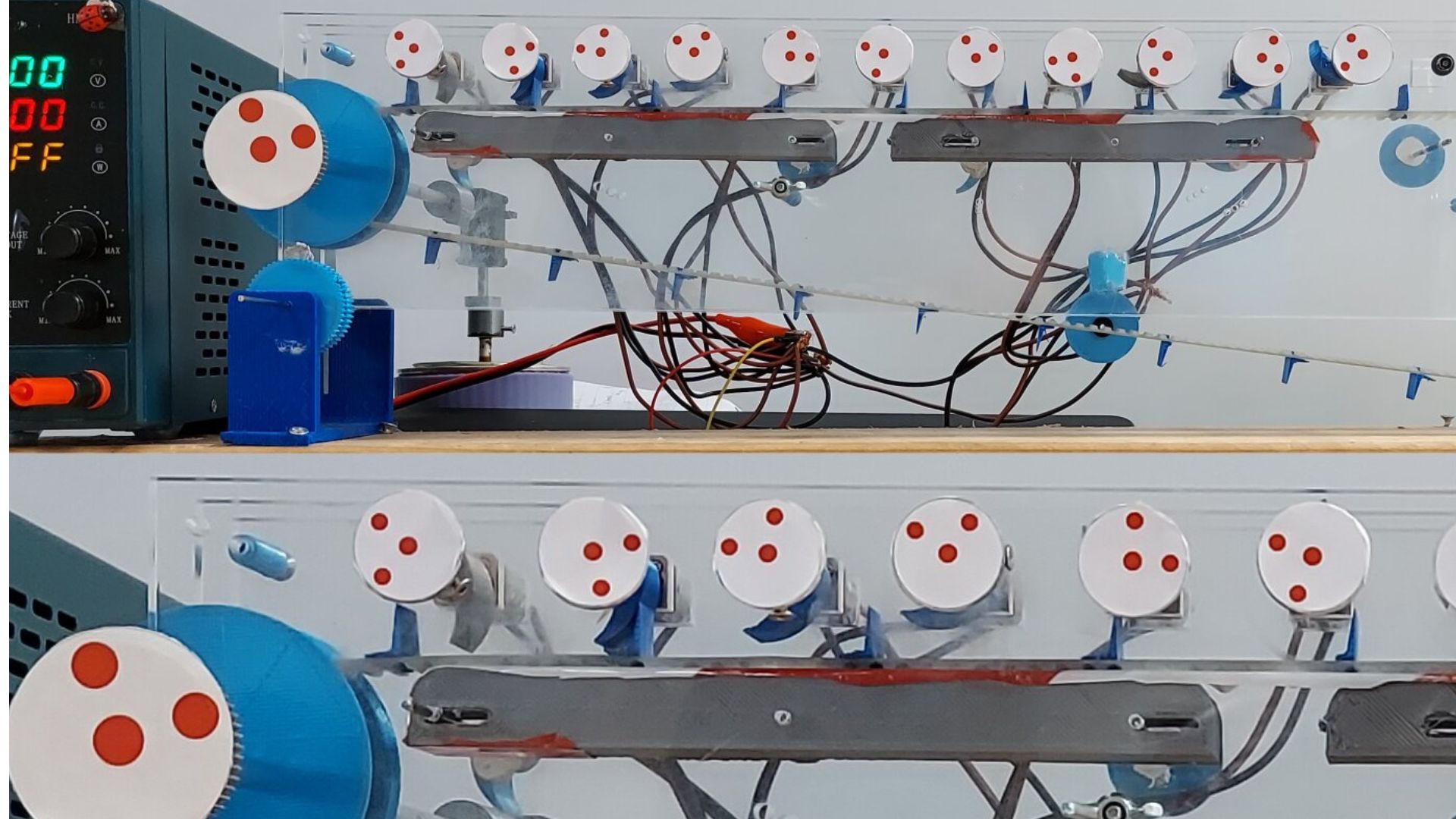
Pesquisadores da Universidade de Bristol adotaram uma abordagem diferente. Seu sistema de motores artificiais consiste em uma rede de motores mecânicos simples cujo comportamento coletivo emerge de suas interações em vez de controle centralizado. O resultado é movimento que imita de perto a dinâmica distribuída de sistemas musculares biológicos.
Como o Sistema Funciona
A rede de motores de Bristol é construída em torno de atuadores individuais relativamente simples — semelhantes em princípio às unidades motoras que compõem os músculos biológicos. Cada atuador individual é limitado em suas capacidades, mas quando interconectado em uma rede, o sistema como um todo produz comportamentos que nenhum atuador individual poderia gerar.
Isto reflete a arquitetura do músculo biológico. Uma fibra muscular humana pode se contrair ou relaxar, mas a saída de força graduada e o movimento suave que experimentamos vem do recrutamento de números diferentes de fibras em momentos diferentes. O sistema de Bristol aplica esse princípio a atuadores mecânicos, usando interações de rede em vez de unidades individuais complexas para produzir comportamentos coletivos sofisticados.
Em vez de programar trajetórias e perfis de força precisos centralmente, os controladores podem emitir comandos de nível superior e permitir que a dinâmica da rede lide com os detalhes de coordenação. Isto é mais robusto para cargas inesperadas e variações ambientais do que as abordagens tradicionais de controle.

Aplicações em Robótica Macia
Robótica macia — robôs feitos de materiais flexíveis em vez de estruturas rígidas — emergiu como uma das áreas mais ativas de pesquisa em robótica. Robôs macios podem interagir de forma mais segura com humanos, navegar por espaços apertados ou irregulares e manipular objetos delicados sem o risco de manipuladores rígidos.
O desafio para a robótica macia tem sido a atuação. A maioria dos sistemas de atuadores macios são difíceis de controlar com precisão e tendem a produzir movimentos relativamente lentos e limitados. Uma rede de motores artificiais que possa coordenar muitos atuadores para movimentos mais dinâmicos e naturais poderia expandir significativamente o que robôs macios podem fazer.
Próteses e Dispositivos Vestíveis
Uma das áreas de aplicação mais imediatas é próteses. As próteses atuais, mesmo os designs mioelétricos avançados, frequentemente parecem mecânicas de formas que frustram os usuários. Uma prótese construída com base em princípios de rede de motores artificiais poderia produzir dinâmicas de movimento mais naturais e se adaptar mais flexivelmente às cargas e contextos da vida diária.
A natureza distribuída do controle também oferece potenciais vantagens em robustez — se unidades individuais de atuadores falharem, a rede pode compensar, em vez de o membro inteiro perder a função. Dispositivos vestíveis de reabilitação que assistem o movimento humano representam outra aplicação de curto prazo, particularmente para recuperação de acidente vascular cerebral e assistência de mobilidade.

O Caminho para Implantação
A pesquisa de Bristol está em um estágio inicial — demonstrando o princípio e caracterizando o comportamento do sistema em vez de produzir dispositivos implantáveis. O caminho da demonstração laboratorial para próteses comerciais ou dispositivos vestíveis de reabilitação envolve engenharia substancial, aprovação regulatória e validação clínica.
Mas o conceito subjacente — aplicar princípios biológicos de coordenação muscular distribuída a sistemas mecânicos — é compelling o bastante para que vários grupos de pesquisa e empresas de dispositivos médicos provavelmente o persigam. Se robôs macios com redes de motores artificiais conseguirem eventualmente se mover com algo próximo à naturalidade de membros biológicos, a gama de tarefas que podem executar ao lado de humanos se expandirá dramaticamente.
Este artigo é baseado em relatórios da Interesting Engineering. Leia o artigo original.
Originally published on interestingengineering.com