Percepção como Segurança, Não Apenas Desempenho
À medida que os robôs humanoides fazem a transição de ambientes de pesquisa para implantação comercial e industrial, os marcos técnicos de como eles percebem e navegam no mundo se tornam tão importantes quanto suas capacidades físicas. Na NVIDIA GTC 2026, a RealSense demonstrou navegação de robôs humanoides com LimX Dynamics, apresentando uma arquitetura perceptual que trata a segurança como uma restrição de design primária em vez de uma reflexão tardia.
Nadav Orbach, CEO da RealSense, estruturou o desafio diretamente: os humanoides operam em três dimensões, ao lado de pessoas, em ambientes que estão constantemente mudando. Se os robôs vão trabalhar com segurança ao lado dos humanos, a percepção carrega responsabilidade além dos sensores brutos. Deve funcionar como o córtex visual do robô, permitindo localização precisa, evitar colisões, compreensão do terreno e movimento estável e previsível em ambientes não estruturados.
A Base Técnica: CuVSLAM e Detecção de Profundidade
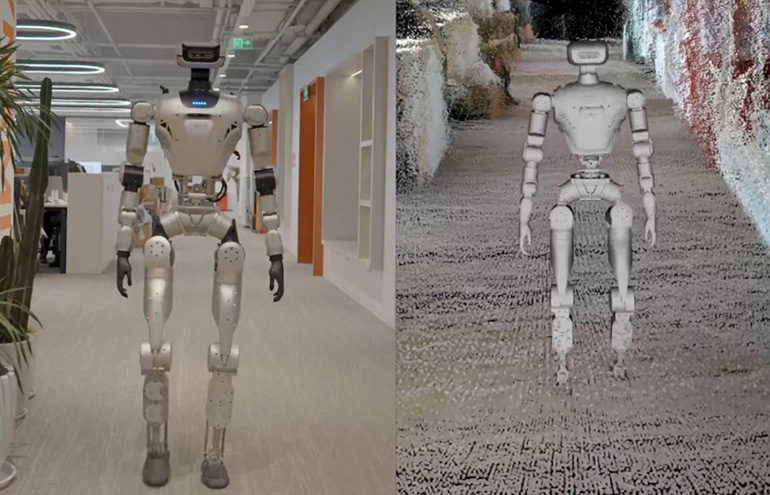
A demonstração da RealSense usou câmeras de profundidade e CuVSLAM do NVIDIA - uma biblioteca de localização e mapeamento simultâneo visual acelerada por GPU - para permitir mapeamento 3D em tempo real e localização na plataforma humanoide LimX. SLAM é uma capacidade fundamental para navegação autônoma: permite que um robô construa um mapa de seu ambiente enquanto rastreia simultaneamente sua própria posição naquele mapa, sem depender de infraestrutura externa como GPS ou sinalizadores pré-instalados.
As câmeras de profundidade fornecem os dados de alcance necessários para construir representações 3D precisas do ambiente, detectando obstáculos em várias distâncias e alturas. Para um robô humanoide bípede navegando terreno projetado para humanos - incluindo degraus, rampas, passagens estreitas e pisos bagunçados - a compreensão precisa do terreno 3D é essencial para locomoção segura. Um robô que só vê em 2D ou tem percepção de profundidade limitada é mais propenso a julgar mal os obstáculos e cair ou colidir com pessoas e objetos.
O CuVSLAM da NVIDIA é executado nos módulos de computação de borda Jetson da empresa, cada vez mais integrados em plataformas robóticas para fornecer a potência computacional necessária para processamento visual em tempo real. Ao acelerar SLAM em hardware GPU, o CuVSLAM pode processar dados de profundidade em velocidades rápidas o suficiente para ambientes dinâmicos onde as posições de pessoas e obstáculos mudam continuamente.

O Imperativo de Segurança na Colaboração Humano-Robô
A ênfase em segurança na apresentação da GTC da RealSense reflete uma mudança mais ampla em como a indústria de robótica está abordando a implantação de robôs móveis capazes em espaços compartilhados com humanos. Os robôs industriais operaram historicamente em ambientes fechados para evitar colisões humano-robô. Robôs colaborativos introduziram braços com força limitada que podem operar em maior proximidade com as pessoas. Robôs humanoides representam o próximo passo: plataformas projetadas para navegar livremente por ambientes humanos e potencialmente interagir diretamente com as pessoas.
Isso cria um regime de segurança diferente. Um robô humanoide se movendo por um armazém, chão de fábrica ou ambiente de varejo deve lidar com movimento humano imprevisível, iluminação variada, superfícies reflexivas que confundem sensores de profundidade e terreno que pode mudar inesperadamente. As quedas são particularmente perigosas - um robô humanoide de qualquer tamanho significativo pode lesionar uma pessoa sobre a qual cai.
A plataforma LimX na demonstração da RealSense parece ser projetada para abordar esses cenários através de percepção redundante - usando múltiplas modalidades de câmera e processamento acelerado por GPU para manter um modelo ambiental confiável mesmo sob condições que podem derrotar um sistema menos capaz.
O Contexto GTC: Impulso da Nvidia em Robótica
A NVIDIA GTC 2026 apresentou um agrupamento incomumente denso de anúncios de robótica, refletindo o compromisso declarado de Jensen Huang de tornar a robótica um pilar de negócios importante junto com IA em data center. A plataforma Jetson da Nvidia e a pilha Isaac de robótica estão posicionando a empresa como o provedor de computação dominante para sistemas autônomos - um papel análogo ao que as GPUs agora desempenham em treinamento e inferência de IA.
A demonstração RealSense-LimX é um exemplo de como a Nvidia está possibilitando um ecossistema de empresas de robótica para construir sistemas capazes em sua pilha de hardware e software. Ao fornecer CuVSLAM como uma biblioteca pré-construída otimizada para hardware Nvidia, a empresa reduz o ônus de desenvolvimento nas empresas de robótica e padroniza a camada de computação - uma estratégia que funcionou bem no mercado de data center de IA.
A implicação mais ampla é que a navegação de robôs humanoides está se aproximando de um nível de maturidade onde a implantação comercial em ambientes industriais restritos está se tornando viável, com arquiteturas perceptuais focadas em segurança como a abordagem RealSense fornecendo a infraestrutura habilitadora. A questão já não é se os robôs podem navegar em espaços humanos, mas se podem fazê-lo com confiabilidade e segurança suficientes para operar sem supervisão humana constante.
Este artigo é baseado em reportagem de The Robot Report. Leia o artigo original.

Originally published on therobotreport.com