Empresas de robótica estão indo além da visão bruta em direção a uma compreensão espacial mais profunda
A Brain Corp e a Universidade da Califórnia em San Diego estão ampliando sua colaboração de pesquisa para melhorar a forma como robôs autônomos entendem ambientes complexos. O trabalho se concentra em mapeamento semântico e no que os parceiros descrevem como uma “camada de ancoragem contextual”, uma representação digital de espaços físicos destinada a ajudar os robôs a interpretar o ambiente de forma mais confiável em contextos comerciais e industriais.
O anúncio chega em um momento em que os desenvolvedores de robótica correm para incorporar sistemas de visão-linguagem-ação e outras ferramentas de IA generativa em máquinas do mundo real. Esses modelos ampliaram o que os robôs podem inferir a partir de imagens e linguagem, mas a questão central é se eles conseguem fazer isso com consistência e resiliência suficientes para implantação em ambientes movimentados e imprevisíveis.
Por que Brain Corp e a UC San Diego acham que mapas ainda importam
Segundo a fonte fornecida, a colaboração parte da posição de que mapas semânticos 3D contextuais continuam essenciais, mesmo enquanto o setor explora sistemas de IA que operam mais diretamente a partir de dados visuais. Em outras palavras, uma percepção mais rica não elimina a necessidade de compreensão espacial estruturada. Ela pode até tornar essa necessidade mais urgente.
Essa é uma posição importante em um campo cada vez mais empolgado com IA de ponta a ponta. Se a parceria estiver certa, o caminho para uma autonomia prática dependerá não apenas de modelos maiores, mas também de modelos de mundo robustos que digam às máquinas o que são os objetos, onde estão e como se relacionam com as tarefas que um robô tenta executar.
Do SLAM à consciência situacional
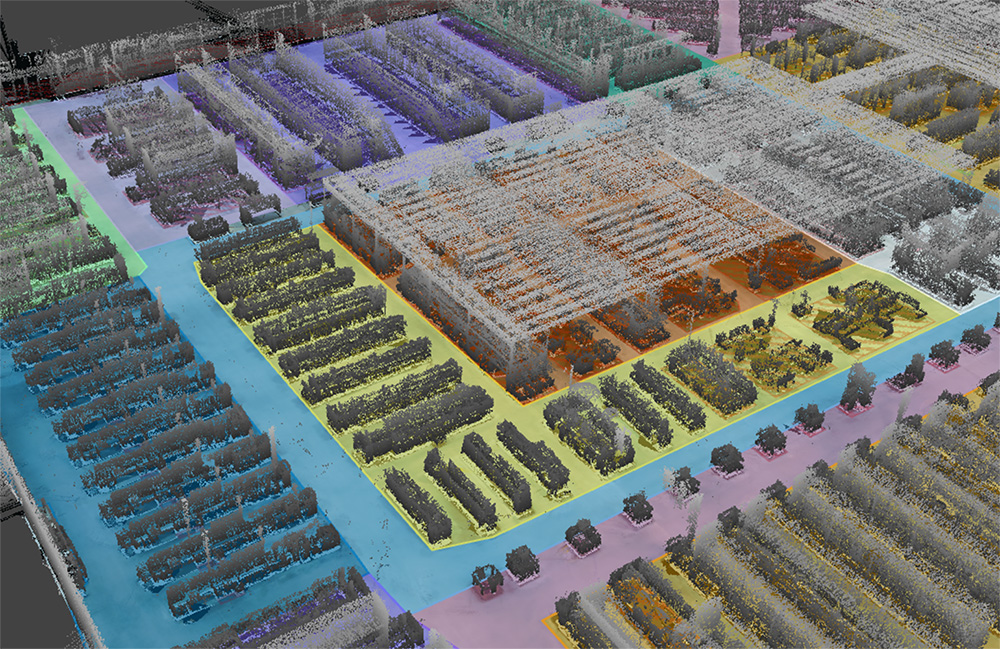
Localização e mapeamento simultâneos, ou SLAM, ajudaram os robôs a sair de células industriais fixas e entrar em espaços dinâmicos, permitindo que construíssem e atualizassem mapas enquanto navegavam. O próximo passo, segundo os parceiros, é dar a esses mapas mais profundidade semântica e contextual. Isso significa ir além da geometria em direção à compreensão: não apenas um corredor, mas um corredor com pessoas, obstáculos, fluxos de trabalho e regras operacionais em mudança.
A fonte descreve a camada de ancoragem contextual como uma representação digital inteligente que poderia dar suporte a robôs, drones e veículos autônomos. O benefício prometido é uma consciência situacional forte o suficiente para permitir que sistemas avançados de IA reajam de forma intuitiva e segura em ambientes físicos compartilhados com pessoas.
O problema comercial por trás da pesquisa
O apelo dessa direção é prático. Muitas falhas em robótica não acontecem porque um sistema não consegue reconhecer um objeto em laboratório. Elas acontecem porque os espaços reais são bagunçados, reconfiguráveis e socialmente complexos. Prateleiras se movem, carrinhos aparecem, pessoas interrompem fluxos, e as condições de iluminação mudam. Um robô que consegue classificar imagens, mas não consegue ancorar essas informações em um contexto espacial persistente, é mais difícil de confiar.
A presença operacional da Brain Corp dá ao projeto um pano de fundo real de implantação. A fonte cita mais de 50.000 robôs implantados globalmente, o que significa que a empresa trabalha a partir de uma base instalada, e não apenas de protótipos de pesquisa. Isso importa porque sugere que a parceria mira autonomia comercialmente relevante, e não apenas benchmarking acadêmico.
Um caminho intermediário para a IA física
A colaboração também reflete uma mudança mais ampla na estratégia de robótica. O setor busca cada vez mais um caminho intermediário entre a automação frágil e específica para tarefas e uma IA de propósito geral ambiciosa demais. O mapeamento contextual é uma candidata a essa camada intermediária. Ele pode preservar estrutura e segurança ao mesmo tempo que permite comportamentos mais flexíveis por cima.
Se essa abordagem se tornará fundamental dependerá da execução, especialmente de como esses mapas mais ricos escalam, se atualizam e se integram a modelos de IA em rápida evolução. Mas a ideia central é sólida: em robótica, inteligência não é apenas enxergar. É ancorar a percepção em um modelo estável do mundo. A Brain Corp e a UC San Diego apostam que essa camada, e não apenas o tamanho bruto do modelo, pode ser o que torna a próxima geração de sistemas autônomos implantável fora de ambientes controlados.
Este artigo é baseado em reportagem do The Robot Report. Leia o artigo original.
Originally published on therobotreport.com


