जुड़ी हुई मशीनों के लिए सुरक्षा अब स्टैक के ऊपर जा रही है
जैसे-जैसे स्वायत्त प्रणालियाँ नियंत्रित औद्योगिक वातावरणों से निकलकर सड़कों, परिसरों, गोदामों और मोहल्लों तक फैल रही हैं, सबसे बड़े अनुत्तरित सवालों में से एक अब यह नहीं रहा कि क्या कोई एक मशीन अपने वातावरण को समझ सकती है। असली सवाल यह है कि क्या कई मशीनें, जब वे आपस में जुड़ी हों, सुरक्षित रूप से समन्वय कर सकती हैं। Interesting Engineering की एक रिपोर्ट के अनुसार, अमेरिका-नेतृत्व वाली एक टीम ने एक ऐसा ढांचा पेश किया है जिसका उद्देश्य रोबोटों, स्वचालित कारों और संबंधित जुड़े हुए सिस्टमों के नेटवर्क को अधिक सुरक्षित बनाना है।
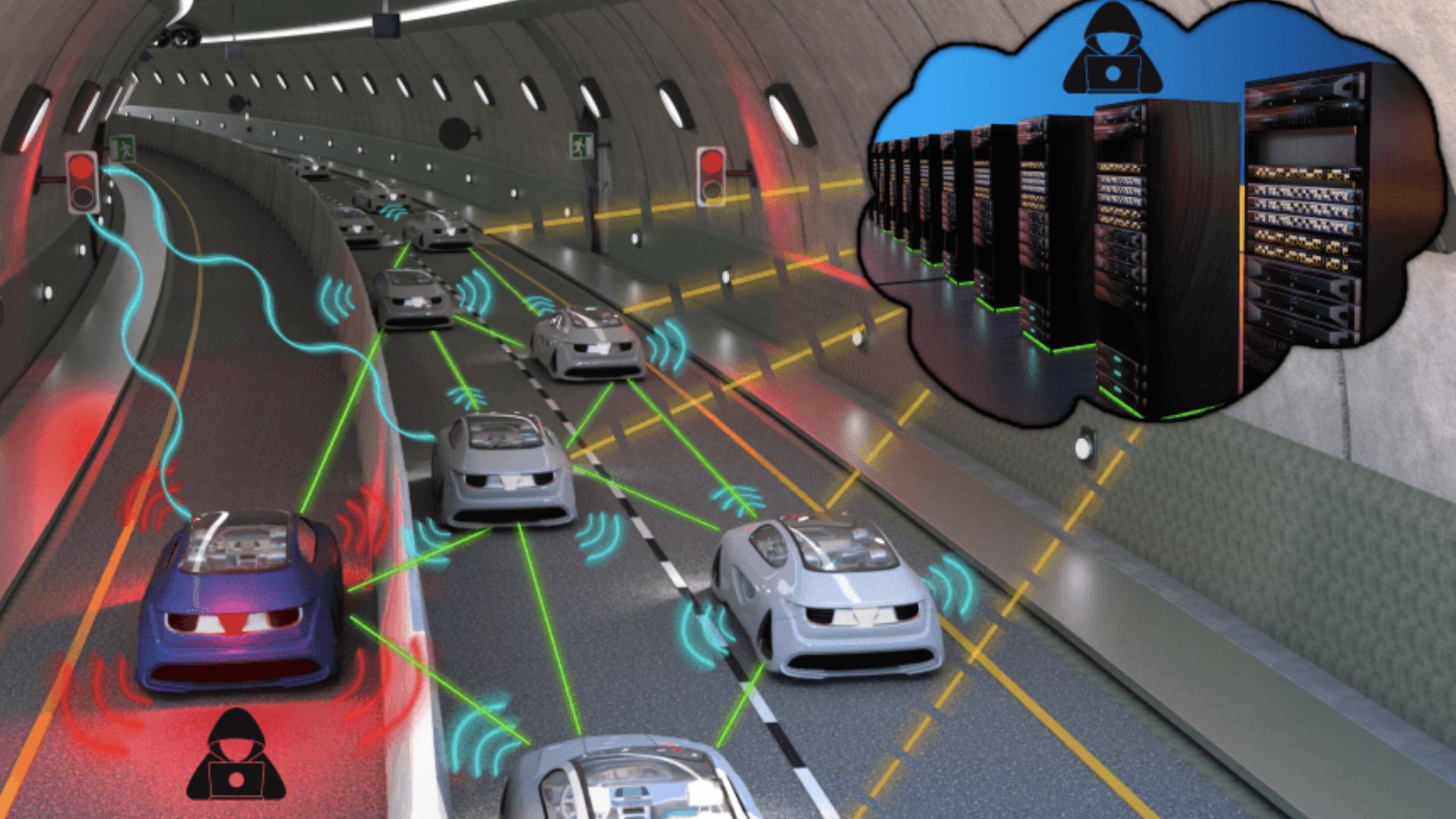
उपलब्ध सीमित विवरणों, उम्मीदवार मेटाडेटा और एक्सर्प्ट से भी फोकस साफ है: एक अलग-थलग डिवाइस की सुरक्षा नहीं, बल्कि मशीन नेटवर्क की सुरक्षा। यह एक महत्वपूर्ण अंतर है। किसी स्वायत्त वाहन या डिलीवरी रोबोट की चुनौती ऑनबोर्ड सेंसिंग और नियंत्रण पर खत्म नहीं होती। जैसे ही कई एजेंट डेटा साझा करने लगते हैं, समान जानकारी पर काम करते हैं, या अन्य मशीनों के व्यवहार पर निर्भर हो जाते हैं, सुरक्षा की समस्या पूरे सिस्टम की हो जाती है।
ऐसे वातावरण के लिए बनाया गया ढांचा इसलिए महत्वपूर्ण है क्योंकि नेटवर्क्ड ऑटोनॉमी नए विफलता-रूप पैदा करती है। कोई रोबोट स्थानीय स्तर पर सही निर्णय ले सकता है, फिर भी अगर साझा जानकारी में देरी हो, वह असंगत हो, या नेटवर्क की दूसरी मशीनें उसे गलत समझ लें, तो वह असुरक्षित समग्र परिणाम में योगदान दे सकता है।
नेटवर्क सुरक्षा अलग क्यों है
पारंपरिक सुरक्षा इंजीनियरिंग अक्सर इस सवाल से शुरू होती है कि एक मशीन कैसे विफल होती है और उन विफलताओं को कैसे सीमित किया जाए। जुड़े हुए ऑटोनॉमी के लिए व्यापक दृष्टि चाहिए। नेटवर्क्ड सिस्टम में एक समस्या फैल सकती है। एक खराब सिग्नल, गलत स्थिति-अनुमान, या देर से मिला निर्देश कई एजेंटों को एक साथ प्रभावित कर सकता है। नतीजा जाम, टक्कर का जोखिम, या पूरे नेटवर्क में श्रृंखलाबद्ध भ्रम हो सकता है।
इसीलिए औपचारिक ढांचा एक क्रमिक सॉफ़्टवेयर पैच से अधिक महत्वपूर्ण हो सकता है। फ्रेमवर्क यह परिभाषित करने में मदद करते हैं कि सिस्टम को कैसे मॉडल किया जाए, कौन-सी धारणाएँ सुरक्षित हैं, और तैनाती से पहले अंतःक्रियाओं का मूल्यांकन कैसे किया जाए। रोबोटिक डिलीवरी, सहकारी ऑटोनॉमी, और जुड़े हुए वाहन पारिस्थितिकी-तंत्र जैसे उभरते क्षेत्रों में, प्रयोगों से वास्तविक अवसंरचना तक स्केल करने के लिए ये प्रश्न केंद्रीय हैं।
स्वचालित कारों और डिलीवरी रोबोटों का उल्लेख विशेष रूप से प्रासंगिक है। ये ऐसे सिस्टम हैं जिनसे उम्मीद की जाती है कि वे लोगों के आसपास, गतिशील वातावरण में, और अक्सर अधूरी जानकारी के साथ काम करें। उनका प्रदर्शन केवल सेंसिंग और योजना पर नहीं, बल्कि संचार, समन्वय, और साझा नियमों की विश्वसनीयता पर भी निर्भर करता है।

स्टैंडअलोन ऑटोनॉमी से कोऑपरेटिव ऑटोनॉमी तक
यह विकास उन्नत गतिशीलता और रोबोटिक्स में एक व्यापक बदलाव को भी दर्शाता है। वर्षों तक ऑटोनॉमी में अधिकांश इंजीनियरिंग प्रयास अलग-अलग सिस्टमों को अधिक सक्षम बनाने पर केंद्रित रहे। अब यह क्षेत्र धीरे-धीरे कोऑपरेटिव ऑटोनॉमी की ओर बढ़ रहा है, जहाँ मूल्य कई मशीनों के साथ काम करने से आता है। इससे दक्षता, कवरेज और प्रतिक्रिया-क्षमता बढ़ सकती है, लेकिन सुरक्षा-शासन के लिए दांव भी बढ़ जाते हैं।
एक ऐसे शहर की कल्पना करें जहाँ डिलीवरी रोबोट, स्वायत्त शटल, सड़क किनारे लगे सेंसर और लॉजिस्टिक्स प्लेटफ़ॉर्म सब एक-दूसरे के साथ इंटरैक्ट करते हों। तब सुरक्षा का सवाल सिर्फ यह नहीं रहता कि हर घटक अपनी परीक्षा पास करता है या नहीं। सवाल यह है कि क्या पूरा नेटवर्क दबाव, क्षरण, या मिश्रित ट्रैफ़िक स्थितियों में पूर्वानुमेय व्यवहार करता है। इस समस्या को संबोधित करने वाला ढांचा परिवहन, लॉजिस्टिक्स, नगर प्रौद्योगिकी और औद्योगिक स्वचालन सभी के लिए प्रासंगिक हो सकता है।
यह नियमन के लिए भी महत्वपूर्ण हो सकता है। नीति-निर्माता आम तौर पर प्रौद्योगिकी तैनाती की तुलना में धीमे चलते हैं, खासकर तब जब सिस्टम नए और तकनीकी रूप से जटिल हों। सुरक्षा ढांचे नियामकों और ऑपरेटरों को एक साझा भाषा दे सकते हैं। वे यह स्पष्ट करने में मदद कर सकते हैं कि क्या मापा जाना चाहिए, क्या ऑडिट किया जाना चाहिए, और बड़े पैमाने पर सिस्टम पर भरोसा करने से पहले किस तरह के साक्ष्य की आवश्यकता होनी चाहिए।
आगे क्या देखना है
यहाँ उपलब्ध उम्मीदवार जानकारी में स्वयं ढांचे के तकनीकी विवरण शामिल नहीं हैं, इसलिए सबसे बचाव योग्य निष्कर्ष वही है जो सबसे महत्वपूर्ण भी है: शोधकर्ता नेटवर्क सुरक्षा को एक प्राथमिक इंजीनियरिंग समस्या के रूप में देख रहे हैं। यह अपने आप में एक अर्थपूर्ण विकास है।
अगला सवाल यह होगा कि क्या यह ढांचा अकादमिक या प्रयोगशाला परिवेश के बाहर भी उपयोगी साबित होता है। इस क्षेत्र के किसी भी दृष्टिकोण का वास्तविक प्रभाव इस पर निर्भर करता है कि क्या डेवलपर, मोबिलिटी ऑपरेटर, निर्माता, और अंततः मानक-निर्धारण संस्थाएँ इसे अपनाती हैं। एक अच्छा ढांचा इतना ठोस होना चाहिए कि डिजाइन निर्णयों और परीक्षण का मार्गदर्शन कर सके, लेकिन इतना लचीला भी कि विभिन्न मशीन प्रकारों और संचालन वातावरणों पर लागू हो सके।
यदि यह संतुलन हासिल किया जा सके, तो लाभ काफी बड़ा हो सकता है। नेटवर्क्ड रोबोट और जुड़े हुए स्वायत्त वाहन कम नहीं, बल्कि अधिक आम होने की संभावना रखते हैं। जैसे-जैसे ऐसा होगा, सार्वजनिक स्वीकृति इस पर निर्भर करेगी कि क्या सुरक्षा क्षमता के साथ कदम मिला पाती है। एक ऐसा ढांचा जो संगठनों को सिस्टम-व्यापी जोखिम पर विचार करने में मदद करे, उस अदृश्य अवसंरचना का हिस्सा बन सकता है जो ऑटोनॉमी को भरोसेमंद बनाती है।
इसीलिए इस घोषणा पर ध्यान देना चाहिए। यह एक परिपक्व होते क्षेत्र की ओर इशारा करती है, जो धीरे-धीरे यह समझने लगा है कि ऑटोनॉमी की सबसे कठिन सुरक्षा समस्याएँ शायद एक मशीन के गलत होने से नहीं, बल्कि कई मशीनों के एक साथ काम करने की कोशिश से उत्पन्न होती हैं।
यह लेख Interesting Engineering की रिपोर्टिंग पर आधारित है। मूल लेख पढ़ें.
Originally published on interestingengineering.com