अंडरवॉटर रोबोटिक्स समुद्री पुरातत्व को और गहराई तक ले जा रही है
Interesting Engineering के उपलब्ध candidate metadata के अनुसार, एक remotely operated robot ने समुद्र की सतह से 1.5 मील से अधिक नीचे पड़े 16वीं सदी के फ्रांसीसी shipwreck का मानचित्रण किया है। रिपोर्ट के मुताबिक, रोबोट ने साइट की 86,000 तस्वीरें लीं और artifacts भी निकाले, जिससे अत्यंत कठिन वातावरण में बड़े पैमाने पर visual documentation और physical retrieval दोनों संभव हुए।
संक्षेप में भी, ये विवरण robotics, imaging और heritage work के निरंतर संगम की ओर इशारा करते हैं। इतनी गहराई पर मौजूद wreck तक पहुँचना ही नहीं, उसे व्यवस्थित रूप से अध्ययन करना भी कठिन है। इतनी बड़ी संख्या में तस्वीरें यह संकेत देती हैं कि यह एक त्वरित निरीक्षण नहीं, बल्कि घनत्व और सटीकता पर आधारित documentation campaign था। व्यावहारिक रूप से, यही subsea exploration को केवल खोज से आगे बढ़ाकर reconstruction और analysis तक ले जाता है।
तस्वीरों की संख्या क्यों मायने रखती है
86,000 तस्वीरों का आंकड़ा अपने आप में उल्लेखनीय है। High-volume imaging आधुनिक remote surveying की बुनियादों में से एक है, क्योंकि यह चुनिंदा फोटोग्राफी की तुलना में साइट का अधिक पूर्ण रिकॉर्ड दे सकती है। Archaeologists और conservation teams के लिए एक विस्तृत visual archive recovered objects जितना ही महत्वपूर्ण हो सकता है। यह layout, context और condition को ऐसे रूप में संरक्षित करता है जिसे अलग-अलग artifacts नहीं कर सकते।
यह बात विशेष रूप से 16वीं सदी के shipwreck पर लागू होती है। उस युग के maritime sites व्यापार, प्रौद्योगिकी, युद्ध और दैनिक जीवन के time capsules होते हैं। किसी site को disturbance से पहले जितनी पूरी तरह document किया जाए, उतनी ही बेहतर संभावना रहती है यह समझने की कि क्या मिला, wreck कैसे बैठा, और उसकी सामग्री क्या बता सकती है।
रोबोटिक्स वहां पहुँच बढ़ाता है जहां divers नहीं जा सकते
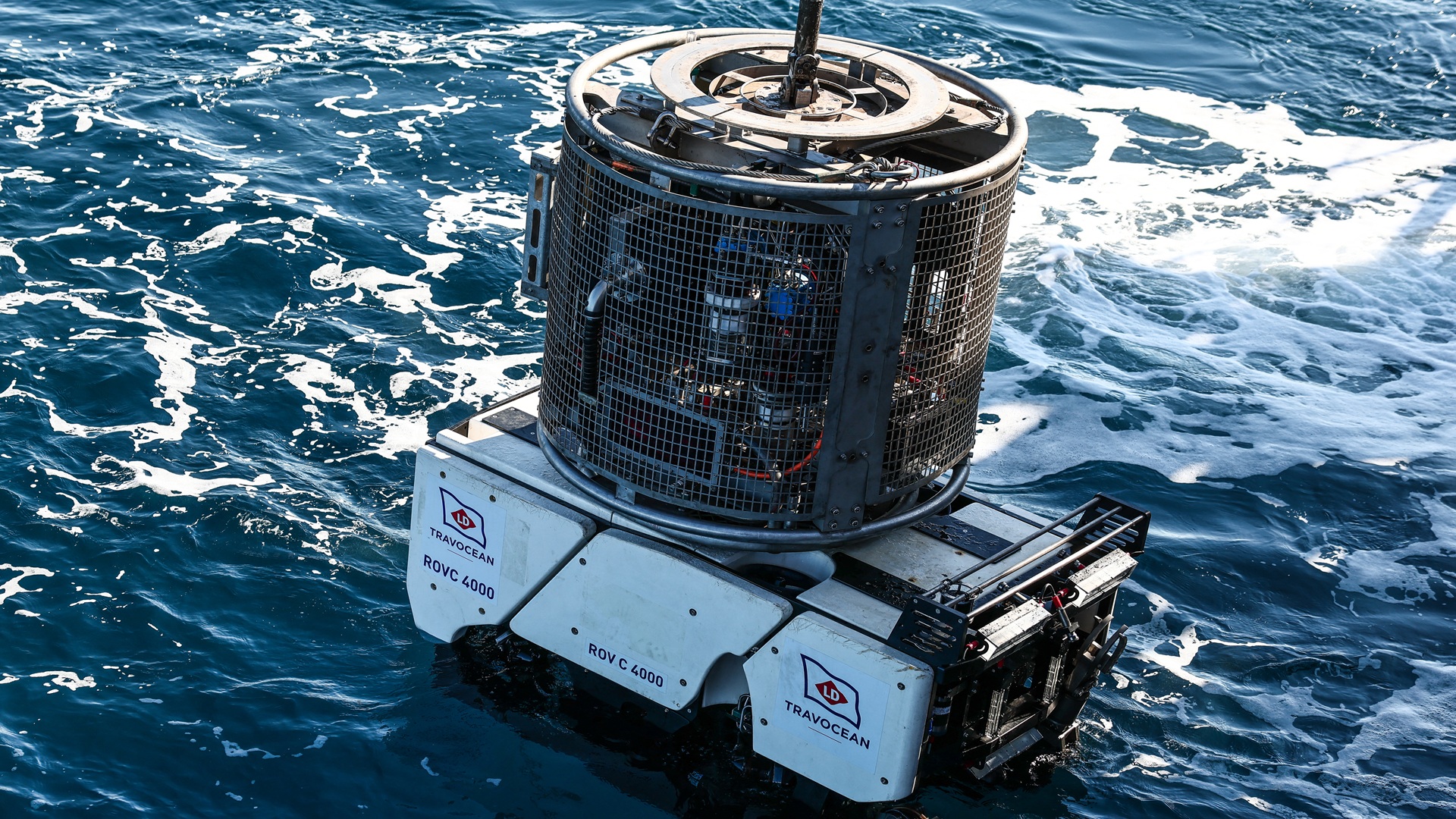
Candidate summary में बताई गई गहराई, यानी 1.5 मील से अधिक, इस operation को archaeology story जितना ही robotics story भी बनाती है। मानव divers ऐसी परिस्थितियों में काम नहीं कर सकते। इसलिए observation, navigation और retrieval का काम remotely operated या autonomous systems को करना पड़ता है। इस अर्थ में, इस तरह का हर सफल deep-ocean survey robotic platforms के working envelope को फैलाता है, न कि केवल एक और वैज्ञानिक image set तैयार करता है।
Remotely operated robot का उपयोग एक व्यापक operational model को भी दर्शाता है जो extreme-environment work में तेजी से आम हो रहा है। लोगों को खतरे वाले क्षेत्र में भेजने के बजाय, टीमें sensing, control और manipulation systems बनाती हैं जो गहराई में काम कर सकें, जबकि विशेषज्ञ सतह से आने वाले डेटा-stream का विश्लेषण करते हैं। यह तरीका जोखिम कम करता है और endurance बढ़ाता है, जो underwater robotics के science, infrastructure और exploration में फैलने के प्रमुख कारणों में से दो हैं।
Artifacts और संदर्भ
रिपोर्ट summary में यह भी कहा गया है कि रोबोट ने wreck से artifacts निकाले। Recovery हमेशा दो समानांतर प्रश्न उठाती है: कौन-सी वस्तुएँ वापस लाई गईं, और प्रक्रिया के दौरान कितना contextual information सुरक्षित रखा गया। क्योंकि उपलब्ध source extract सीमित है, फिलहाल मुख्य पुष्ट बात यही है कि mission में mapping और retrieval दोनों शामिल थे। यही संयोजन महत्वपूर्ण है। इसका अर्थ है कि operation केवल visual reconnaissance तक सीमित नहीं था और site से सीधे संपर्क करने की क्षमता भी रखता था।
Innovation watchers के लिए यह direct interaction ही महत्वपूर्ण तकनीकी संकेत है। Imaging systems समझ बनाने में मदद करते हैं, लेकिन retrieval के लिए precision की एक और परत चाहिए। Extreme depth से वस्तुओं को बिना नुकसान पहुँचाए पकड़ना, उठाना और ले जाना एक चुनौतीपूर्ण कार्य है, खासकर जब सामग्री नाजुक और ऐतिहासिक रूप से महत्वपूर्ण हो सकती है।
भविष्य के extreme-environment missions के लिए एक मॉडल
ऐसी कहानियाँ याद दिलाती हैं कि innovation केवल प्रयोगशालाओं और data centers में नहीं हो रही। यह उन जगहों पर भी हो रही है जहाँ पहुँच ही समस्या है। एक ऐसा रोबोट जो सदियों पुराने wreck को विस्तार से document कर सके और 1.5 मील से अधिक गहराई से artifacts निकाल सके, mobility, sensing और remote manipulation में एक साथ प्रगति का संकेत देता है।
यह maritime history से आगे भी मायने रखता है। वही तकनीकी श्रेणियाँ जो deep-sea archaeological work को संभव बनाती हैं, अक्सर industrial inspection, subsea energy operations, environmental monitoring और उन अन्य missions को भी प्रभावित करती हैं जहाँ मनुष्यों का जाना आसान नहीं होता। इस mission का विशिष्ट cargo भले ऐतिहासिक हो, लेकिन platform logic समकालीन और व्यापक रूप से उपयोगी है।
कम से कम, candidate एक ऐसे mission का वर्णन करता है जिसने एक साथ तीन काम किए: extreme-depth access, massive image capture, और artifact recovery। यह इसे एक महत्वपूर्ण robotics milestone और इस बात का उपयोगी उदाहरण बनाता है कि remote systems पृथ्वी के सबसे कठिन-से-पहुँचने वाले वातावरणों से क्या कुछ खोज, रिकॉर्ड और भौतिक रूप से वापस ला सकते हैं।
यह लेख Interesting Engineering की रिपोर्टिंग पर आधारित है। मूल लेख पढ़ें.
Originally published on interestingengineering.com