रोबोटिक्स कंपनियां कच्ची दृष्टि से आगे बढ़कर गहरी स्थानिक समझ की ओर देख रही हैं
Brain Corp और यूनिवर्सिटी ऑफ कैलिफोर्निया, सैन डिएगो स्वायत्त रोबोटों द्वारा जटिल परिवेशों को समझने के तरीके को बेहतर बनाने के लिए अपनी शोध साझेदारी का विस्तार कर रहे हैं। यह काम सेमांटिक मैपिंग और जिसे साझेदार “कॉन्टेक्स्चुअल ग्राउंडिंग लेयर” कहते हैं, उस पर केंद्रित है, जो भौतिक स्थानों का एक डिजिटल निरूपण है और जिसका उद्देश्य व्यावसायिक तथा औद्योगिक सेटिंग्स में रोबोटों को अपने आसपास को अधिक भरोसेमंद तरीके से समझने में मदद करना है।
यह घोषणा ऐसे समय आई है जब रोबोटिक्स डेवलपर विज़न-लैंग्वेज-एक्शन और अन्य जनरेटिव एआई प्रणालियों को वास्तविक दुनिया की मशीनों में शामिल करने की दौड़ में हैं। इन मॉडलों ने रोबोटों की छवियों और भाषा से निष्कर्ष निकालने की क्षमता बढ़ाई है, लेकिन मूल प्रश्न यह है कि क्या वे व्यस्त, अप्रत्याशित परिवेशों में तैनाती के लिए पर्याप्त निरंतरता और लचीलापन के साथ ऐसा कर सकते हैं।
Brain Corp और UC San Diego को क्यों लगता है कि मानचित्र अब भी महत्वपूर्ण हैं
प्रदान किए गए स्रोत के अनुसार, यह सहयोग यह मानता है कि उद्योग भले ही दृश्य डेटा से अधिक सीधे तौर पर काम करने वाली एआई प्रणालियों की खोज कर रहा हो, फिर भी संदर्भात्मक 3D सेमांटिक मानचित्र आवश्यक बने रहते हैं। दूसरे शब्दों में, अधिक समृद्ध परसेप्शन संरचित स्थानिक समझ की आवश्यकता को समाप्त नहीं करता। बल्कि, यह उस आवश्यकता को और अधिक तात्कालिक बना सकता है।
यह एक महत्वपूर्ण रुख है, एक ऐसे क्षेत्र में जो तेजी से एंड-टू-एंड एआई को लेकर उत्साहित है। यदि यह साझेदारी सही है, तो व्यावहारिक स्वायत्तता का रास्ता केवल बड़े मॉडलों पर नहीं, बल्कि मजबूत विश्व मॉडलों पर भी निर्भर करेगा, जो मशीनों को बताएंगे कि वस्तुएं क्या हैं, वे कहां हैं, और रोबोट जिन कार्यों को करने की कोशिश कर रहा है, उनसे उनका क्या संबंध है।
SLAM से स्थिति-जागरूकता तक
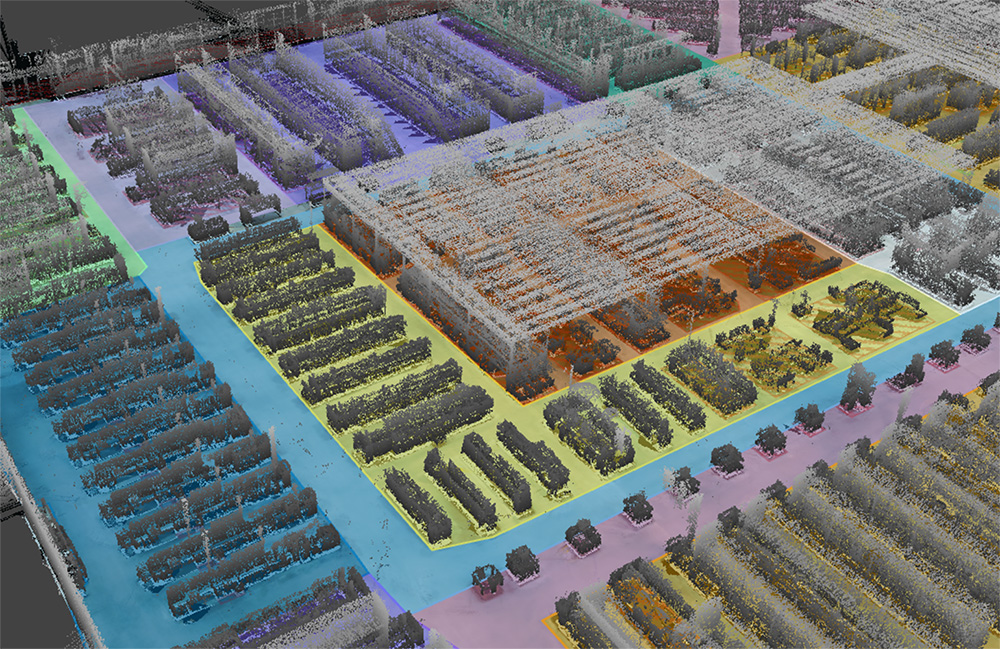
सिमल्टेनियस लोकलाइज़ेशन एंड मैपिंग, या SLAM, ने रोबोटों को स्थिर औद्योगिक कोशिकाओं से गतिशील स्थानों में ले जाने में मदद की, क्योंकि इसने उन्हें नेविगेशन के दौरान मानचित्र बनाने और अपडेट करने की अनुमति दी। साझेदारों के अनुसार अगला कदम इन मानचित्रों को अधिक सेमांटिक और संदर्भात्मक गहराई देना है। इसका मतलब केवल ज्यामिति से आगे बढ़कर समझ की ओर जाना है: सिर्फ एक गलियारा नहीं, बल्कि लोगों, बाधाओं, कार्यप्रवाहों और बदलते संचालन नियमों वाला गलियारा।
स्रोत कॉन्टेक्स्चुअल ग्राउंडिंग लेयर को एक बुद्धिमान डिजिटल निरूपण के रूप में वर्णित करता है, जो रोबोटों, ड्रोन और स्वचालित वाहनों को समर्थन दे सकता है। इसका वादा ऐसी स्थिति-जागरूकता है जो इतनी मजबूत हो कि उन्नत एआई प्रणालियां लोगों के साथ साझा भौतिक परिवेशों में सहज और सुरक्षित ढंग से प्रतिक्रिया दे सकें।
शोध के पीछे का व्यावसायिक मुद्दा
इस दिशा की अपील व्यावहारिक है। रोबोटिक्स की कई विफलताएं इसलिए नहीं होतीं कि कोई प्रणाली प्रयोगशाला में किसी वस्तु को पहचान नहीं सकती। वे इसलिए होती हैं क्योंकि वास्तविक स्थान अव्यवस्थित, पुनर्विन्यस्त होने योग्य और सामाजिक रूप से जटिल होते हैं। शेल्फ़्स हिलते हैं, कार्ट आते हैं, लोग प्रवाह में बाधा डालते हैं, और प्रकाश स्थितियां बदलती रहती हैं। जो रोबोट छवियों का वर्गीकरण कर सकता है लेकिन उस जानकारी को स्थायी स्थानिक संदर्भ में नहीं जोड़ सकता, उस पर भरोसा करना कठिन होता है।
Brain Corp की परिचालन उपस्थिति इस परियोजना को एक वास्तविक तैनाती का संदर्भ देती है। स्रोत में वैश्विक स्तर पर 50,000 से अधिक रोबोट तैनात होने का उल्लेख है, जिसका अर्थ है कि कंपनी केवल शोध प्रोटोटाइपों से नहीं, बल्कि एक स्थापित आधार से काम कर रही है। यह महत्वपूर्ण है क्योंकि इससे पता चलता है कि यह साझेदारी केवल अकादमिक बेंचमार्किंग के लिए नहीं, बल्कि वाणिज्यिक रूप से प्रासंगिक स्वायत्तता के लिए भी है।
भौतिक एआई के लिए एक मध्य मार्ग
यह सहयोग रोबोटिक्स रणनीति में एक व्यापक बदलाव को भी दर्शाता है। उद्योग अब कठोर, कार्य-विशिष्ट स्वचालन और अत्यधिक महत्वाकांक्षी सामान्य-उद्देश्य एआई के बीच एक मध्य मार्ग खोज रहा है। संदर्भात्मक मैपिंग इस मध्य परत के लिए एक उम्मीदवार है। यह ऊपर की परत पर अधिक लचीले व्यवहार की अनुमति देते हुए संरचना और सुरक्षा को बनाए रख सकती है।
क्या यह दृष्टिकोण मौलिक बनता है या नहीं, यह कार्यान्वयन पर निर्भर करेगा, खासकर इस पर कि ये समृद्ध मानचित्र कितनी अच्छी तरह स्केल होते हैं, अपडेट होते हैं और तेजी से विकसित हो रहे एआई मॉडलों के साथ एकीकृत होते हैं। लेकिन मूल विचार सही है: रोबोटिक्स में बुद्धिमत्ता केवल देखने के बारे में नहीं है। यह धारणा को दुनिया के एक स्थिर मॉडल में ग्राउंड करने के बारे में भी है। Brain Corp और UC San Diego दांव लगा रहे हैं कि यह परत, केवल मॉडल के आकार के बजाय, अगली पीढ़ी की स्वायत्त प्रणालियों को नियंत्रित वातावरणों के बाहर तैनात करने योग्य बनाने की कुंजी हो सकती है।
यह लेख The Robot Report की रिपोर्टिंग पर आधारित है। मूल लेख पढ़ें.
Originally published on therobotreport.com