Le GPS Devient Une Cible
Les drones évoluent de plus en plus dans des environnements où le GPS ne peut pas être tenu pour acquis. Le texte source de Breaking Defense, présenté par Vantor, explique comment les outils de brouillage et d’usurpation deviennent moins coûteux, plus accessibles et plus faciles à déployer. Pour les aéronefs sans pilote, cela crée un problème de mission direct : sans positionnement fiable, les drones peuvent dévier de leur trajectoire, ne pas terminer leurs tâches ou devenir plus faciles à intercepter.
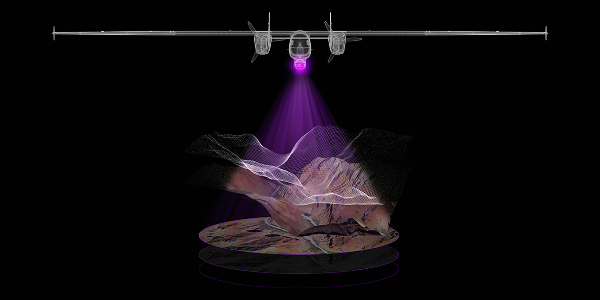
La réponse proposée est la navigation fondée sur la vision 3D. Au lieu de s’appuyer uniquement sur les signaux satellitaires, un drone utilise ses caméras embarquées et des données cartographiques haute résolution pour comparer ce qu’il voit en temps réel à une représentation connue du terrain. Si la correspondance est précise, le drone peut continuer à naviguer même lorsque le GPS est refusé ou dégradé.
Positionnement Absolu Contre Navigation À L’Estime
La source souligne l’importance du positionnement absolu : savoir exactement où se trouve un drone à un instant donné. Le GPS fournit cela directement lorsqu’il est disponible. Sans lui, de nombreux systèmes retombent sur le positionnement relatif, en estimant le mouvement à partir de la dernière position connue à l’aide de mesures embarquées. Cette approche peut se dégrader rapidement, car de petites erreurs s’accumulent avec le temps.
Paul Millhouse, identifié dans la source comme directeur principal des produits Raptor chez Vantor, décrit le problème ainsi : une fois le GPS disparu, le système peut savoir où il était, mais pas précisément où il est. Cette incertitude augmente avec la distance et le temps. Pour les missions militaires, logistiques et de reconnaissance, l’erreur de localisation cumulée peut faire la différence entre réussite et échec.
Pourquoi Le Relief 3D Est Important
La navigation par vision repose sur des données de référence. Un drone a besoin d’un modèle fiable du terrain environnant pour comparer les images de la caméra en direct à la carte. La source décrit la solution Raptor de Vantor comme l’utilisation de décennies de cartographie mondiale pour fournir une couche de référence 3D pour le positionnement en temps réel.
L’aspect 3D est important parce que les aéronefs sans pilote volant à basse altitude ne perçoivent pas le monde comme une image plane. La forme du terrain, l’altitude, les structures, les lignes de crête et d’autres éléments peuvent tous aider un système à se localiser. Kara Kramer, identifiée comme responsable des ventes de Raptor, explique que le système comprend le terrain plutôt qu’il n’interprète une image 2D plate.
La Pression Contre Les Drones Augmente
Le défi de navigation s’inscrit dans une compétition plus large entre les drones et les systèmes anti-drones. À mesure que les drones deviennent moins chers et plus répandus, les adversaires ont davantage intérêt à attaquer leurs systèmes de guidage. La source note qu’un seul brouilleur ou usurpateur peut perturber la navigation sur une zone, affectant potentiellement les systèmes qui dépendent de signaux satellitaires propres.
Cela est particulièrement pertinent dans les contextes militaires contestés, mais cela s’applique aussi aux environnements isolés et pauvres en infrastructures, où la couverture GPS peut être irrégulière ou vulnérable. La source appelle cela la tyrannie de la distance : opérer sur de longues distances sans positionnement fiable.
Chevauchement Entre Le Commercial Et Le Militaire
L’article est présenté sous l’angle des usages de défense, mais le problème sous-jacent est plus large. Les drones logistiques, les aéronefs d’inspection, les systèmes de réponse aux catastrophes et les plateformes autonomes ont tous besoin d’un positionnement résilient. Toute mission qui envoie un système sans pilote dans un endroit dangereux ou impraticable pour les humains devient plus fragile si la navigation dépend d’un seul signal externe.
La navigation par vision 3D ne remplace pas nécessairement le GPS. Une architecture plus réaliste utilise le GPS lorsqu’il est disponible et le vérifie ou le remplace par la vision lorsqu’il ne l’est pas. Cette approche en couches est courante en autonomie : plusieurs capteurs et systèmes de référence réduisent la dépendance à une seule entrée.
Limites Et Questions Ouvertes
La source est sponsorisée et centrée sur le produit Raptor de Vantor ; ses affirmations doivent donc être lues comme la description d’une approche soutenue par une entreprise, et non comme un test comparatif indépendant. Le texte fourni ne donne pas de données de référence, de résultats d’essais sur le terrain, de taux d’erreur, d’exigences de calcul ni de performances dans des conditions de météo et de visibilité difficiles.
Ces détails manquants comptent. La navigation par caméra peut être affectée par l’obscurité, la fumée, la neige, les terrains sans relief marquant, l’actualité des cartes, la qualité des capteurs et les limites du traitement embarqué. Les cartes 3D haute résolution doivent aussi être maintenues et rendues disponibles pour les zones où opèrent les drones. La solidité du concept dépend de la manière dont ces contraintes pratiques sont gérées.
La Direction Pris De La Technologie
Même avec ces réserves, le basculement stratégique est clair. À mesure que l’interférence GPS devient plus facile à déployer, les systèmes autonomes ont besoin de méthodes de positionnement qui restent utiles dans des environnements radiofréquences dégradés. La navigation par vision 3D est l’une des voies les plus concrètes, car elle utilise le monde physique lui-même comme référence.
Pour les drones qui évoluent près du sol, le terrain n’est pas un décor. C’est un signal de navigation. Plus les systèmes savent lire ce signal avec précision, moins ils dépendent de satellites que des adversaires peuvent brouiller ou usurper.
Cet article est basé sur un reportage de Breaking Defense. Lire l’article original.
Originally published on breakingdefense.com