El GPS Se Está Convirtiendo En Un Objetivo
Los drones operan cada vez más en entornos donde el GPS no puede darse por garantizado. El texto original de Breaking Defense, presentado por Vantor, describe cómo las herramientas de bloqueo y suplantación son cada vez más baratas, accesibles y fáciles de desplegar. Para los aeronaves no tripuladas, eso crea un problema directo de misión: sin una posición fiable, los drones pueden desviarse de su ruta, no completar tareas o ser más fáciles de interceptar.
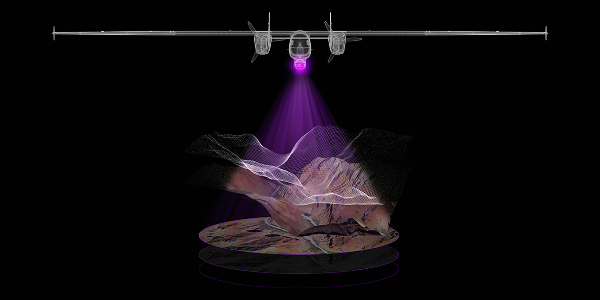
La respuesta propuesta es la navegación basada en visión 3D. En lugar de depender únicamente de señales satelitales, un dron usa cámaras a bordo y datos cartográficos de alta resolución para comparar lo que ve en tiempo real con una representación conocida del terreno. Si la coincidencia es precisa, el dron puede seguir navegando incluso cuando el GPS está denegado o degradado.
Posicionamiento Absoluto Frente A Navegación A Estima
La fuente subraya la importancia del posicionamiento absoluto: saber exactamente dónde está un dron en un momento dado. El GPS ofrece eso de forma directa cuando está disponible. Sin él, muchos sistemas recurren al posicionamiento relativo, estimando el movimiento a partir de la última ubicación conocida mediante mediciones a bordo. Ese enfoque puede degradarse rápidamente porque los pequeños errores se acumulan con el tiempo.
Paul Millhouse, identificado en la fuente como director sénior de productos Raptor en Vantor, describe el problema así: una vez que desaparece el GPS, el sistema puede saber dónde estaba, pero no con precisión dónde está. Esa incertidumbre crece con la distancia y el tiempo. Para misiones militares, logísticas y de reconocimiento, el error de ubicación acumulado puede marcar la diferencia entre el éxito y el fracaso.
Por Qué Importa El Terreno 3D
La navegación basada en visión depende de datos de referencia. Un dron necesita un modelo fiable del terreno circundante para poder comparar la entrada de la cámara en vivo con el mapa. La fuente describe la solución Raptor de Vantor como un uso de décadas de cartografía global para proporcionar una capa de referencia 3D para el posicionamiento en tiempo real.
El componente 3D es importante porque las aeronaves no tripuladas de baja altitud no experimentan el mundo como una imagen plana. La forma del terreno, la elevación, las estructuras, las crestas y otras características pueden ayudar a un sistema a localizarse. Kara Kramer, identificada como responsable de ventas de Raptor, dice que el sistema entiende el terreno en lugar de interpretar una imagen 2D plana.
La Presión Contra Drones Va En Aumento
El desafío de navegación forma parte de una competencia más amplia entre los drones y los sistemas antidron. A medida que los drones se abaratan y se usan más, los adversarios tienen más incentivos para atacar sus sistemas de guiado. La fuente señala que un solo bloqueador o suplantador puede alterar la navegación en un área, afectando potencialmente a sistemas que dependen de señales satelitales limpias.
Esto es especialmente relevante en entornos militares disputados, pero también se aplica a entornos remotos y con poca infraestructura, donde la cobertura GPS puede ser inconsistente o vulnerable. La fuente llama a esto la tiranía de la distancia: operar a largas distancias sin un posicionamiento fiable.
Coincidencia Entre Lo Comercial Y Lo Militar
El artículo se enmarca en casos de uso de defensa, pero el problema subyacente es más amplio. Los drones logísticos, las aeronaves de inspección, los sistemas de respuesta ante desastres y las plataformas autónomas necesitan posicionamiento resistente. Cualquier misión que envíe un sistema no tripulado a un lugar inseguro o impracticable para humanos se vuelve más frágil si la navegación depende de una sola señal externa.
La navegación por visión 3D no necesariamente reemplaza al GPS. Una arquitectura más realista usa GPS cuando está disponible y lo contrasta o sustituye con visión cuando no lo está. Ese enfoque por capas es común en autonomía: múltiples sensores y sistemas de referencia reducen la dependencia de una sola entrada.
Límites Y Preguntas Abiertas
La fuente está patrocinada y se centra en el producto Raptor de Vantor, por lo que sus afirmaciones deben leerse como la descripción de un enfoque respaldado por una empresa, no como una prueba comparativa independiente. El texto proporcionado no ofrece datos de referencia, resultados de pruebas de campo, tasas de error, requisitos de cómputo ni rendimiento bajo condiciones de clima y visibilidad adversas.
Esos detalles faltantes importan. La navegación basada en cámaras puede verse afectada por la oscuridad, el humo, la nieve, terrenos sin rasgos distintivos, la vigencia de los mapas, la calidad de los sensores y los límites del procesamiento a bordo. Los mapas 3D de alta resolución también deben mantenerse y estar disponibles para las zonas donde operan los drones. La fortaleza del concepto depende de qué tan bien se gestionen esas limitaciones prácticas.
La Dirección Del Cambio
Aun con esas reservas, el cambio estratégico es claro. A medida que la interferencia con GPS se vuelve más fácil de desplegar, los sistemas autónomos necesitan métodos de posicionamiento que sigan siendo útiles en entornos de radiofrecuencia sucia. La navegación por visión 3D es una de las vías más concretas porque utiliza el propio mundo físico como referencia.
Para los drones que operan cerca del suelo, el terreno no es un fondo. Es una señal de navegación. Cuanto más precisamente puedan leer esa señal los sistemas, menos dependerán de satélites que los adversarios pueden bloquear o suplantar.
Este artículo se basa en una cobertura de Breaking Defense. Leer el artículo original.
Originally published on breakingdefense.com