La seguridad sube de nivel para las máquinas conectadas
A medida que los sistemas autónomos pasan de entornos industriales controlados a calles, campus, almacenes y vecindarios, una de las grandes preguntas sin resolver ya no es si una máquina individual puede percibir su entorno. La cuestión es si muchas máquinas pueden coordinarse con seguridad cuando están enlazadas entre sí. Un informe de Interesting Engineering señala que un equipo liderado por Estados Unidos ha presentado un marco destinado a hacer más seguras las redes de robots, coches autónomos y otros sistemas conectados relacionados.
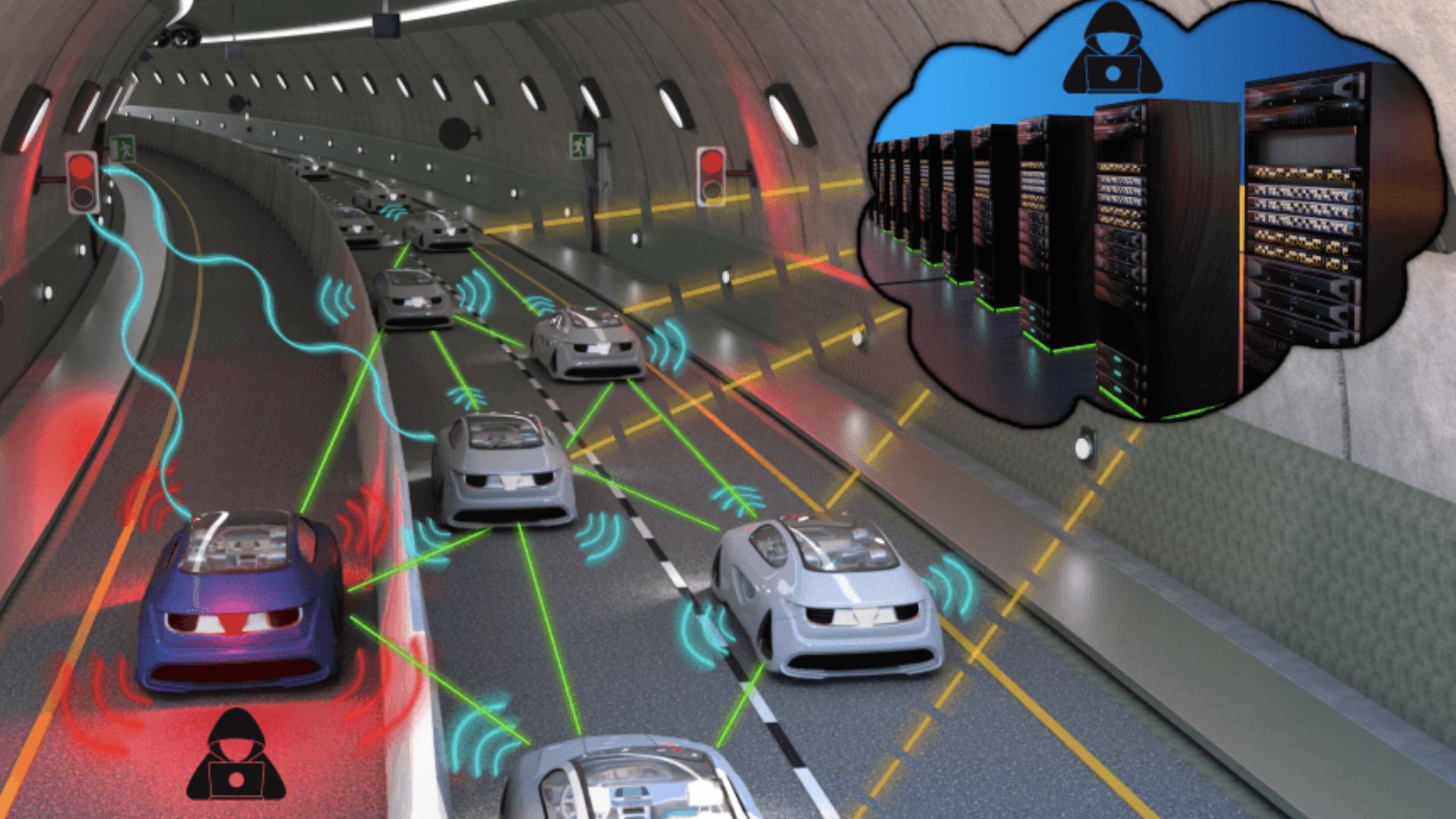
Incluso con los detalles limitados disponibles en los metadatos y el extracto candidatos, el foco es claro: la seguridad en redes de máquinas, no la seguridad de un dispositivo aislado. Esa es una distinción importante. El desafío de un vehículo autónomo o de un robot de reparto no termina con la detección y el control a bordo. Una vez que varios agentes comienzan a compartir datos, actuar sobre información común o depender del comportamiento de otras máquinas, el problema de seguridad pasa a ser de todo el sistema.
Un marco diseñado para ese entorno importa porque la autonomía en red crea nuevos modos de fallo. Un robot puede tomar una decisión local correcta y aun así contribuir a un resultado global inseguro si la información compartida llega con retraso, es inconsistente o es malinterpretada por otras máquinas de la red.
Por qué la seguridad de red es diferente
La ingeniería de seguridad tradicional suele comenzar preguntando cómo falla una máquina y cómo contener esos fallos. La autonomía conectada exige una mirada más amplia. En un sistema en red, un problema puede propagarse. Una señal defectuosa, una estimación de estado incorrecta o una instrucción emitida fuera de tiempo puede influir en varios agentes a la vez. El resultado puede ser congestión, riesgo de colisión o una confusión en cascada en toda la red.
Por eso un marco formal es potencialmente más importante que un parche incremental de software. Los marcos ayudan a definir cómo deben modelarse los sistemas, qué supuestos son seguros y cómo deben evaluarse las interacciones antes del despliegue. En sectores emergentes como el reparto robotizado, la autonomía cooperativa y los ecosistemas de vehículos conectados, esas preguntas son centrales para escalar de los pilotos a la infraestructura real.
La mención de coches autónomos y robots de reparto es especialmente relevante. Son sistemas que deben operar cerca de personas, en entornos dinámicos y, a menudo, con información incompleta. Su rendimiento depende no solo de la detección y la planificación, sino también de la fiabilidad de la comunicación, la coordinación y las reglas compartidas.

De la autonomía aislada a la autonomía cooperativa
El desarrollo también refleja un cambio más amplio en la movilidad avanzada y la robótica. Durante años, gran parte del esfuerzo de ingeniería en autonomía se centró en hacer que los sistemas individuales fueran más capaces. Cada vez más, el campo se mueve hacia la autonomía cooperativa, donde el valor surge de muchas máquinas trabajando juntas. Eso puede mejorar la eficiencia, la cobertura y la capacidad de respuesta, pero también eleva las exigencias de la gobernanza de la seguridad.
Imaginemos una ciudad en la que robots de reparto, lanzaderas autónomas, sensores de borde de carretera y plataformas logísticas interactúan entre sí. La pregunta de seguridad ya no es solo si cada componente aprueba su propia prueba, sino si toda la red se comporta de forma predecible bajo estrés, degradación o condiciones de tráfico mixto. Un marco pensado para abordar ese problema podría ser relevante para el transporte, la logística, la tecnología municipal y la automatización industrial.
También podría importar para la regulación. Los responsables de políticas suelen avanzar más despacio que el despliegue tecnológico, especialmente cuando los sistemas son novedosos y técnicamente complejos. Los marcos de seguridad pueden ofrecer a reguladores y operadores un lenguaje común. Pueden ayudar a aclarar qué debe medirse, qué debe auditarse y qué tipo de evidencia debería exigirse antes de confiar en los sistemas a gran escala.
Qué vigilar ahora
La información candidata proporcionada aquí no incluye detalles técnicos del marco en sí, así que la conclusión más defendible es también la más importante: los investigadores están tratando la seguridad de red como un problema de ingeniería de primer orden. Eso ya es un desarrollo significativo en sí mismo.
La siguiente pregunta será si el marco resulta útil fuera de entornos académicos o de laboratorio. Para cualquier enfoque en esta área, el impacto real depende de que lo adopten desarrolladores, operadores de movilidad, fabricantes y, finalmente, organismos de normalización. Un buen marco debe ser lo bastante concreto para guiar decisiones de diseño y pruebas, pero lo bastante flexible para aplicarse a distintos tipos de máquinas y entornos operativos.
Si se logra ese equilibrio, el beneficio podría ser considerable. Es probable que los robots conectados y los vehículos autónomos conectados sean más comunes, no menos. A medida que eso ocurra, la aceptación pública dependerá de si la seguridad logra acompasar la capacidad. Un marco que ayude a las organizaciones a razonar sobre el riesgo a nivel de sistema podría convertirse en parte de la infraestructura invisible que hace confiable la autonomía.
Por eso este anuncio merece atención. Apunta a un campo en maduración, que empieza a reconocer que los problemas de seguridad más difíciles en la autonomía quizá no surgen de una sola máquina que falla, sino de muchas máquinas intentando trabajar juntas al mismo tiempo.
Este artículo se basa en la cobertura de Interesting Engineering. Leer el artículo original.

Originally published on interestingengineering.com

