La robótica submarina está llevando la arqueología marítima a profundidades cada vez más accesibles
Según los metadatos del candidato proporcionados por Interesting Engineering, un robot operado a distancia cartografió un naufragio francés del siglo XVI situado a más de 1,5 millas bajo la superficie. Según se informó, el robot capturó 86.000 imágenes del sitio y recuperó artefactos, combinando documentación visual a gran escala con recuperación física en un entorno muy por encima del alcance habitual del buceo humano.
Aunque sea en forma breve, los detalles apuntan a la convergencia continua entre robótica, imagen y trabajo patrimonial. Un naufragio a esa profundidad es difícil no solo de alcanzar, sino también de estudiar de manera sistemática. La cifra de imágenes reportada sugiere una campaña de documentación construida sobre densidad y precisión, no sobre una inspección rápida. En términos prácticos, eso es lo que permite que la exploración submarina pase del simple hallazgo a la reconstrucción y el análisis.
Por qué importa la cantidad de imágenes
La cifra de 86.000 imágenes destaca por sí sola. La imagen de alto volumen es una de las bases del levantamiento remoto moderno porque puede ofrecer un registro mucho más completo de un sitio que la fotografía selectiva. Para arqueólogos y equipos de conservación, un archivo visual detallado puede ser tan importante como los objetos recuperados. Preserva la disposición, el contexto y el estado de formas que los artefactos aislados no pueden.
Eso cobra especial importancia en el caso de un naufragio del siglo XVI. Los sitios marítimos de esa época son cápsulas del tiempo de comercio, tecnología, guerra y vida cotidiana. Cuanto más exhaustivamente se documenta un sitio antes de alterarlo, mejores son las posibilidades de comprender no solo qué se encontró, sino cómo quedó reposado el naufragio y qué pueden revelar sus materiales.
La robótica amplía el acceso donde los buzos no pueden llegar
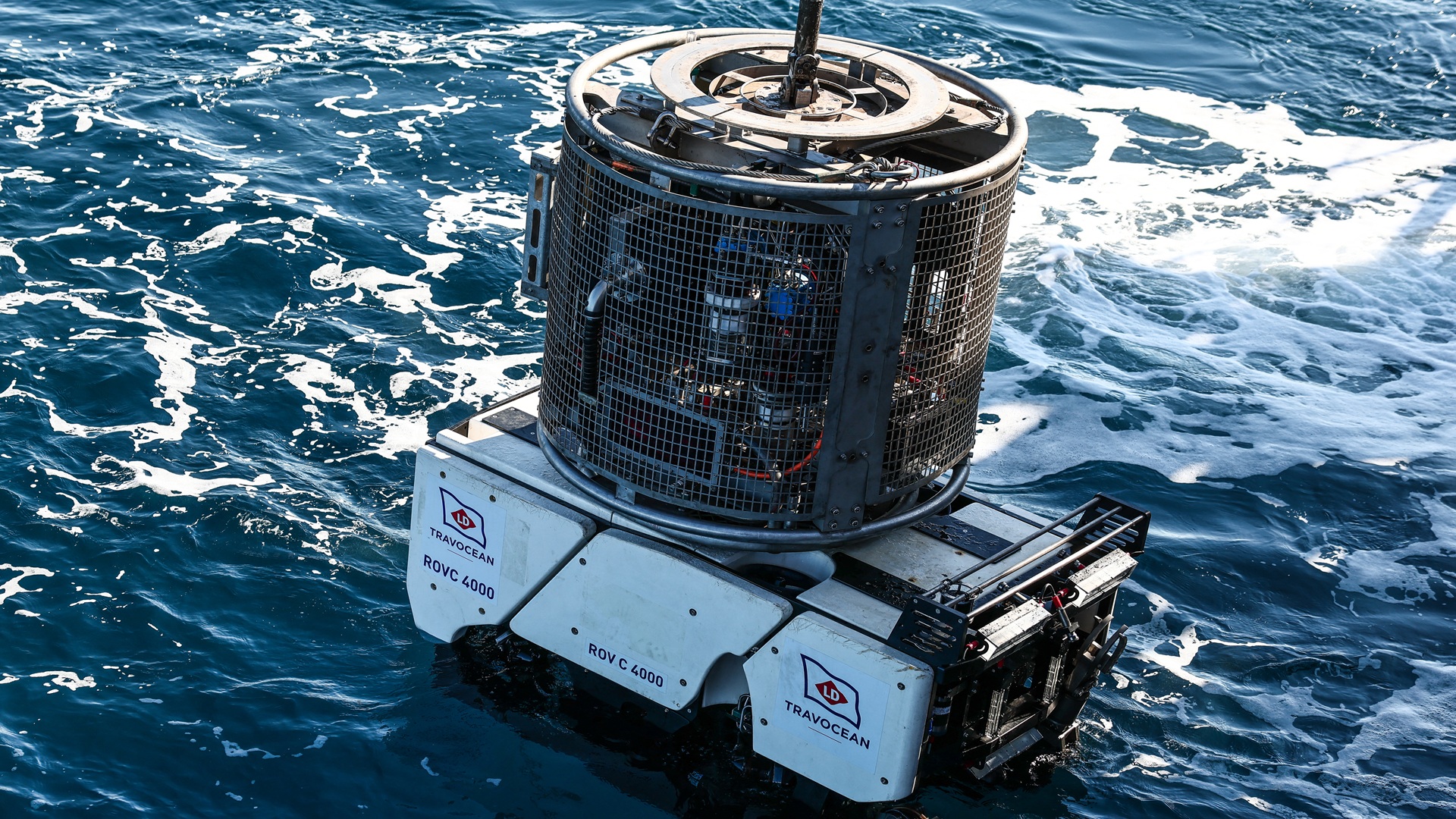
La profundidad citada en el resumen del candidato, más de 1,5 millas, basta para definir esta operación tanto como una historia de robótica como de arqueología. Los buzos humanos no pueden trabajar en esas condiciones. Eso deja a los sistemas operados a distancia o autónomos la tarea de observar, navegar y recuperar. En ese sentido, cada exploración exitosa del océano profundo de este tipo amplía el margen operativo de las plataformas robóticas, en lugar de producir simplemente otro conjunto de imágenes científicas.
El uso de un robot operado a distancia también refleja un modelo operativo más amplio que es cada vez más común en trabajos de entornos extremos. En lugar de enviar personas a la zona de peligro, los equipos construyen sistemas de detección, control y manipulación que pueden operar a gran profundidad mientras expertos analizan desde la superficie el flujo de datos entrantes. Ese enfoque reduce el riesgo y aumenta la resistencia, dos de las principales razones por las que la robótica submarina sigue extendiéndose por la ciencia, la infraestructura y la exploración.
Artefactos y contexto
El resumen del informe también indica que el robot recuperó artefactos del naufragio. La recuperación siempre plantea dos preguntas paralelas: qué objetos se trajeron de vuelta y qué información contextual se preservó en el proceso. Dado que el extracto de la fuente proporcionada es limitado, el punto clave confirmado es simplemente que la misión combinó mapeo y recuperación. Incluso esa combinación es significativa. Significa que la operación no se limitó al reconocimiento visual y tuvo la capacidad de interactuar directamente con el sitio.
Para quienes siguen la innovación, esa interacción directa es la señal técnica importante. Los sistemas de imagen ayudan a construir comprensión, pero la recuperación exige otra capa de precisión. Sujetar, elevar y transportar objetos desde profundidades extremas sin dañarlos es una tarea exigente, especialmente cuando los materiales pueden ser frágiles y de gran valor histórico.
Un modelo para futuras misiones en entornos extremos
Historias como esta recuerdan que la innovación no solo ocurre en laboratorios y centros de datos. También ocurre en lugares donde el acceso en sí es el problema. Un robot capaz de documentar con detalle un naufragio centenario y recuperar artefactos desde más de 1,5 millas bajo el agua representa avances simultáneos en movilidad, detección y manipulación remota.
Eso importa más allá de la historia marítima. Las mismas familias técnicas que permiten el trabajo arqueológico en aguas profundas suelen influir en la inspección industrial, las operaciones energéticas submarinas, la vigilancia ambiental y otras misiones en las que los humanos no pueden ir fácilmente. La carga específica de esta misión puede ser histórica, pero la lógica de la plataforma es contemporánea y ampliamente relevante.
Como mínimo, el candidato describe una misión que logró tres cosas a la vez: acceso a gran profundidad, captura masiva de imágenes y recuperación de artefactos. Eso basta para marcarla como un hito significativo de la robótica y como un ejemplo útil de cómo los sistemas remotos están ampliando lo que puede explorarse, registrarse y recuperarse físicamente en algunos de los entornos más difíciles de alcanzar del planeta.
Este artículo se basa en un reportaje de Interesting Engineering. Lee el artículo original.
Originally published on interestingengineering.com