Percepción como Seguridad, no solo Desempeño
A medida que los robots humanoides hacen la transición de entornos de investigación a despliegue comercial e industrial, los marcos técnicos para cómo perciben y navegan el mundo se vuelven tan importantes como sus capacidades físicas. En NVIDIA GTC 2026, RealSense demostró la navegación de robots humanoides con LimX Dynamics, mostrando una arquitectura perceptual que trata la seguridad como una restricción de diseño primaria en lugar de una idea tardía.
Nadav Orbach, CEO de RealSense, planteó el desafío directamente: los humanoides operan en tres dimensiones, junto a personas, en entornos que están cambiando constantemente. Si los robots van a trabajar de forma segura junto a los humanos, la percepción conlleva responsabilidades más allá de los sensores en bruto. Debe funcionar como la corteza visual del robot, permitiendo localización precisa, evitar colisiones, comprensión del terreno y movimiento estable y predecible en entornos no estructurados.
La Base Técnica: CuVSLAM y Detección de Profundidad
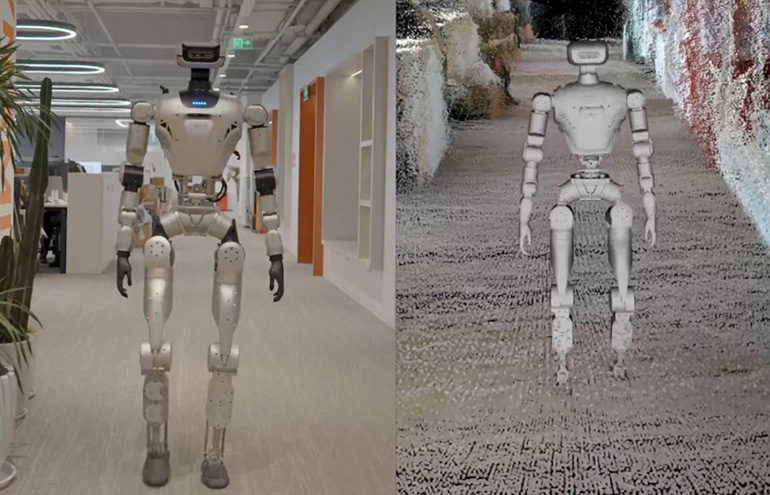
La demostración de RealSense utilizó cámaras de profundidad y CuVSLAM de NVIDIA, una biblioteca de localización y mapeo simultáneo visual acelerada por GPU, para permitir mapeo 3D en tiempo real y localización en la plataforma humanoide LimX. SLAM es una capacidad fundamental para la navegación autónoma: permite que un robot construya un mapa de su entorno mientras rastrea simultáneamente su propia posición dentro de ese mapa, sin depender de infraestructura externa como GPS o balizas preinstaladas.
Las cámaras de profundidad proporcionan los datos de rango necesarios para construir representaciones 3D precisas del entorno, detectando obstáculos a varias distancias y alturas. Para un robot humanoide bípedo navegando por terreno diseñado para humanos, incluyendo escaleras, rampas, pasos estrechos y pisos desordenados, la comprensión precisa del terreno 3D es esencial para la locomoción segura. Un robot que solo ve en 2D o tiene percepción de profundidad limitada es más propenso a malinterpretar obstáculos y caer o colisionar con personas y objetos.
El CuVSLAM de NVIDIA se ejecuta en los módulos de computación edge Jetson de la empresa, cada vez más incorporados en plataformas robóticas para proporcionar la potencia computacional necesaria para el procesamiento visual en tiempo real. Al acelerar SLAM en hardware GPU, CuVSLAM puede procesar datos de profundidad a velocidades lo suficientemente rápidas para entornos dinámicos donde las posiciones de personas y obstáculos cambian continuamente.

El Imperativo de Seguridad en la Colaboración Humano-Robot
El énfasis en seguridad en la presentación de GTC de RealSense refleja un cambio más amplio en cómo la industria robótica está abordando el despliegue de robots móviles capaces en espacios compartidos con humanos. Los robots industriales han operado históricamente en entornos encerrados para prevenir colisiones humano-robot. Los robots colaborativos introdujeron brazos de fuerza limitada que pueden operar en mayor proximidad a las personas. Los robots humanoides representan el siguiente paso: plataformas diseñadas para navegar libremente a través de entornos humanos e interactuar potencialmente directamente con personas.
Esto crea un régimen de seguridad diferente. Un robot humanoide que se mueve a través de un almacén, piso de fábrica o entorno minorista debe lidiar con movimiento humano impredecible, iluminación variada, superficies reflectantes que confunden los sensores de profundidad y terreno que puede cambiar inesperadamente. Las caídas son particularmente peligrosas: un robot humanoide de cualquier tamaño significativo puede lesionar a una persona sobre la que cae.
La plataforma LimX en la demostración de RealSense parece diseñada para abordar estos escenarios a través de percepción redundante: usando múltiples modalidades de cámara y procesamiento acelerado por GPU para mantener un modelo ambiental confiable incluso en condiciones que podrían derrotar a un sistema menos capaz.
El Contexto de GTC: El Empuje de Robotica de Nvidia
NVIDIA GTC 2026 ha presentado un grupo inusualmente denso de anuncios de robótica, reflejando el compromiso establecido de Jensen Huang de hacer de la robótica un pilar comercial importante junto con la IA del centro de datos. La plataforma Jetson de Nvidia y el stack de robótica Isaac están posicionando a la empresa como el proveedor de cómputo dominante para sistemas autónomos, un papel análogo al que los GPU juegan ahora en la capacitación e inferencia de IA.
La demostración de RealSense-LimX es un ejemplo de cómo Nvidia está habilitando un ecosistema de empresas robóticas para construir sistemas capaces en su stack de hardware y software. Al proporcionar CuVSLAM como una biblioteca preinstalada optimizada para hardware Nvidia, la empresa reduce la carga de desarrollo en las empresas robóticas y estandariza la capa de cómputo, una estrategia que ha funcionado bien en el mercado de centros de datos de IA.
La implicación más amplia es que la navegación de robots humanoides se está acercando a un nivel de madurez donde el despliegue comercial en entornos industriales restringidos se está volviendo factible, con arquitecturas perceptuales enfocadas en seguridad como el enfoque RealSense que proporciona la infraestructura habilitadora. La pregunta ya no es si los robots pueden navegar espacios humanos, sino si pueden hacerlo de forma confiable y segura para operar sin supervisión humana constante.
Este artículo se basa en reportajes de The Robot Report. Lee el artículo original.

Originally published on therobotreport.com