Las empresas de robótica miran más allá de la visión en bruto hacia una comprensión espacial más profunda
Brain Corp y la Universidad de California en San Diego están ampliando su colaboración de investigación para mejorar cómo los robots autónomos entienden entornos complejos. El trabajo se centra en el mapeo semántico y en lo que los socios describen como una “capa de anclaje contextual”, una representación digital de espacios físicos destinada a ayudar a los robots a interpretar su entorno de forma más fiable en entornos comerciales e industriales.
El anuncio llega en un momento en que los desarrolladores de robótica se apresuran a incorporar sistemas de visión-lenguaje-acción y otras herramientas de IA generativa en máquinas del mundo real. Esos modelos han ampliado lo que los robots pueden inferir a partir de imágenes y lenguaje, pero la cuestión central es si pueden hacerlo con suficiente consistencia y resiliencia para su despliegue en entornos concurridos e impredecibles.
Por qué Brain Corp y la UC San Diego creen que los mapas siguen importando
Según la fuente proporcionada, la colaboración sostiene que los mapas semánticos 3D contextuales siguen siendo esenciales incluso mientras la industria explora sistemas de IA que operan de forma más directa a partir de datos visuales. En otras palabras, una percepción más rica no elimina la necesidad de una comprensión espacial estructurada. Puede incluso volver esa necesidad más urgente.
Es una postura significativa en un campo cada vez más entusiasmado con la IA de extremo a extremo. Si la alianza tiene razón, el camino hacia una autonomía práctica dependerá no solo de modelos más grandes, sino también de modelos del mundo robustos que digan a las máquinas qué son los objetos, dónde están y cómo se relacionan con las tareas que un robot intenta realizar.
De SLAM a la conciencia situacional
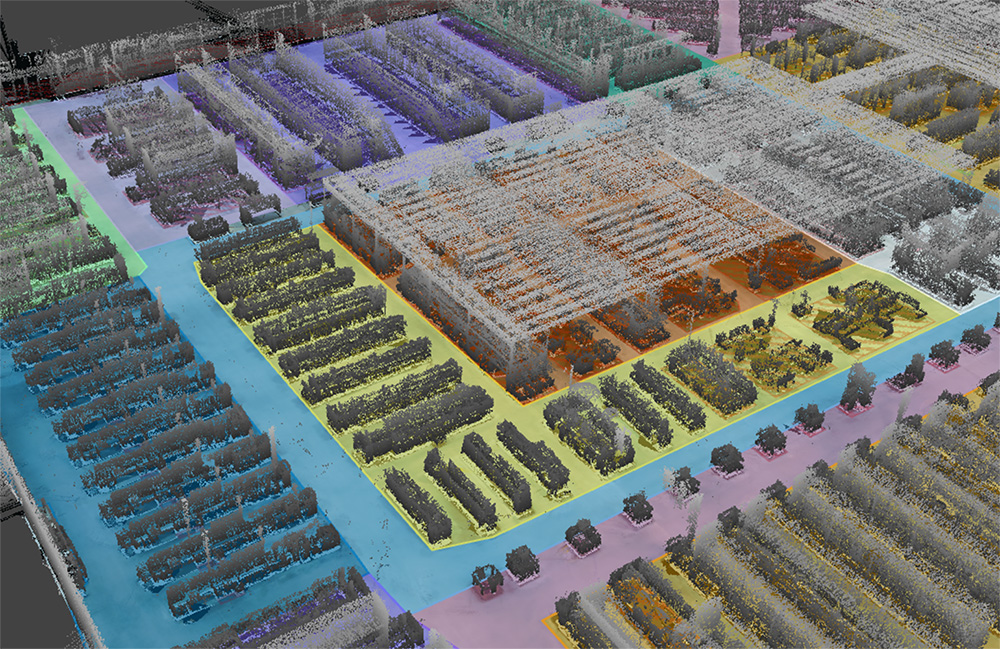
La localización y el mapeo simultáneos, o SLAM, ayudaron a que los robots pasaran de celdas industriales fijas a espacios dinámicos al permitirles construir y actualizar mapas mientras navegan. El siguiente paso, tal como lo plantean los socios, es dotar a esos mapas de más profundidad semántica y contextual. Eso significa ir más allá de la geometría hacia la comprensión: no solo un pasillo, sino un pasillo con personas, obstáculos, flujos de trabajo y reglas operativas cambiantes.
La fuente describe la capa de anclaje contextual como una representación digital inteligente que podría dar soporte a robots, drones y vehículos autónomos. El beneficio prometido es una conciencia situacional lo suficientemente sólida como para permitir que sistemas avanzados de IA respondan de forma intuitiva y segura en entornos físicos compartidos con personas.
El problema comercial detrás de la investigación
El atractivo de esta dirección es práctico. Muchos fallos de la robótica no ocurren porque un sistema no pueda reconocer un objeto en un laboratorio. Ocurren porque los espacios reales son desordenados, reconfigurables y socialmente complejos. Las estanterías se mueven, aparecen carros, las personas interrumpen los flujos y cambian las condiciones de iluminación. Un robot que puede clasificar imágenes pero no anclar esa información en un contexto espacial persistente es más difícil de confiar.
La presencia operativa de Brain Corp da al proyecto un trasfondo real de despliegue. La fuente cita más de 50.000 robots desplegados en todo el mundo, lo que significa que la empresa trabaja a partir de una base instalada y no solo de prototipos de investigación. Eso importa porque sugiere que la alianza está orientada a una autonomía relevante comercialmente, no solo a comparaciones académicas.
Una vía intermedia para la IA física
La colaboración también refleja un cambio más amplio en la estrategia robótica. La industria busca cada vez más una vía intermedia entre la automatización frágil y específica para tareas y una IA de propósito general demasiado ambiciosa. El mapeo contextual es una candidata para esa capa intermedia. Puede preservar la estructura y la seguridad al tiempo que permite un comportamiento más flexible por encima de ella.
Que este enfoque se convierta en algo fundamental dependerá de la ejecución, especialmente de cómo estas mapas más ricos escalen, se actualicen e integren con modelos de IA en rápida evolución. Pero la idea central es sólida: en robótica, la inteligencia no consiste solo en ver. Consiste en anclar la percepción en un modelo estable del mundo. Brain Corp y la UC San Diego apuestan a que esta capa, y no solo el tamaño bruto del modelo, puede ser lo que haga desplegable a la próxima generación de sistemas autónomos fuera de entornos controlados.
Este artículo está basado en una cobertura de The Robot Report. Leer el artículo original.
Originally published on therobotreport.com

