Unterwasserrobotik bringt die maritime Archäologie immer tiefer voran
Ein ferngesteuerter Roboter hat ein französisches Schiffswrack aus dem 16. Jahrhundert kartiert, das mehr als 1,5 Meilen unter der Oberfläche liegt, laut den bereitgestellten Kandidaten-Metadaten von Interesting Engineering. Der Roboter soll 86.000 Bilder des Fundorts aufgenommen und Artefakte geborgen haben und damit groß angelegte visuelle Dokumentation mit physischer Bergung in einer Umgebung kombiniert haben, die weit jenseits der üblichen Reichweite des menschlichen Tauchens liegt.
Schon in Kurzform zeigen die Details die fortlaufende Verknüpfung von Robotik, Bildgebung und Kulturarbeit. Ein Wrack in dieser Tiefe ist nicht nur schwer zu erreichen, sondern auch systematisch zu untersuchen. Die gemeldete Bildzahl deutet auf eine Dokumentationskampagne hin, die auf Dichte und Präzision statt auf einen schnellen Sichtungsdurchgang ausgelegt war. Genau das ermöglicht es in der Praxis, die Unterwassererkundung von der bloßen Entdeckung hin zu Rekonstruktion und Analyse zu entwickeln.
Warum die Bildzahl wichtig ist
Die Zahl von 86.000 Bildern ist für sich genommen bemerkenswert. Hochvolumige Bildaufnahmen gehören zu den Grundlagen moderner Fernerkundung, weil sie eine deutlich vollständigere Aufzeichnung eines Ortes ermöglichen als selektive Fotografie. Für Archäologen und Konservierungsteams kann ein detailliertes visuelles Archiv genauso wichtig sein wie die geborgenen Objekte selbst. Es bewahrt Anordnung, Kontext und Zustand auf eine Weise, die einzelne Artefakte nicht leisten können.
Das ist besonders wichtig bei einem Schiffswrack aus dem 16. Jahrhundert. Maritime Fundstellen aus dieser Zeit sind Zeitkapseln von Handel, Technologie, Krieg und Alltagsleben. Je gründlicher ein Ort vor einer Störung dokumentiert wird, desto besser sind die Chancen zu verstehen, nicht nur was gefunden wurde, sondern auch, wie das Wrack zur Ruhe kam und was seine Materialien verraten können.
Robotik erweitert den Zugang dort, wo Taucher nicht arbeiten können
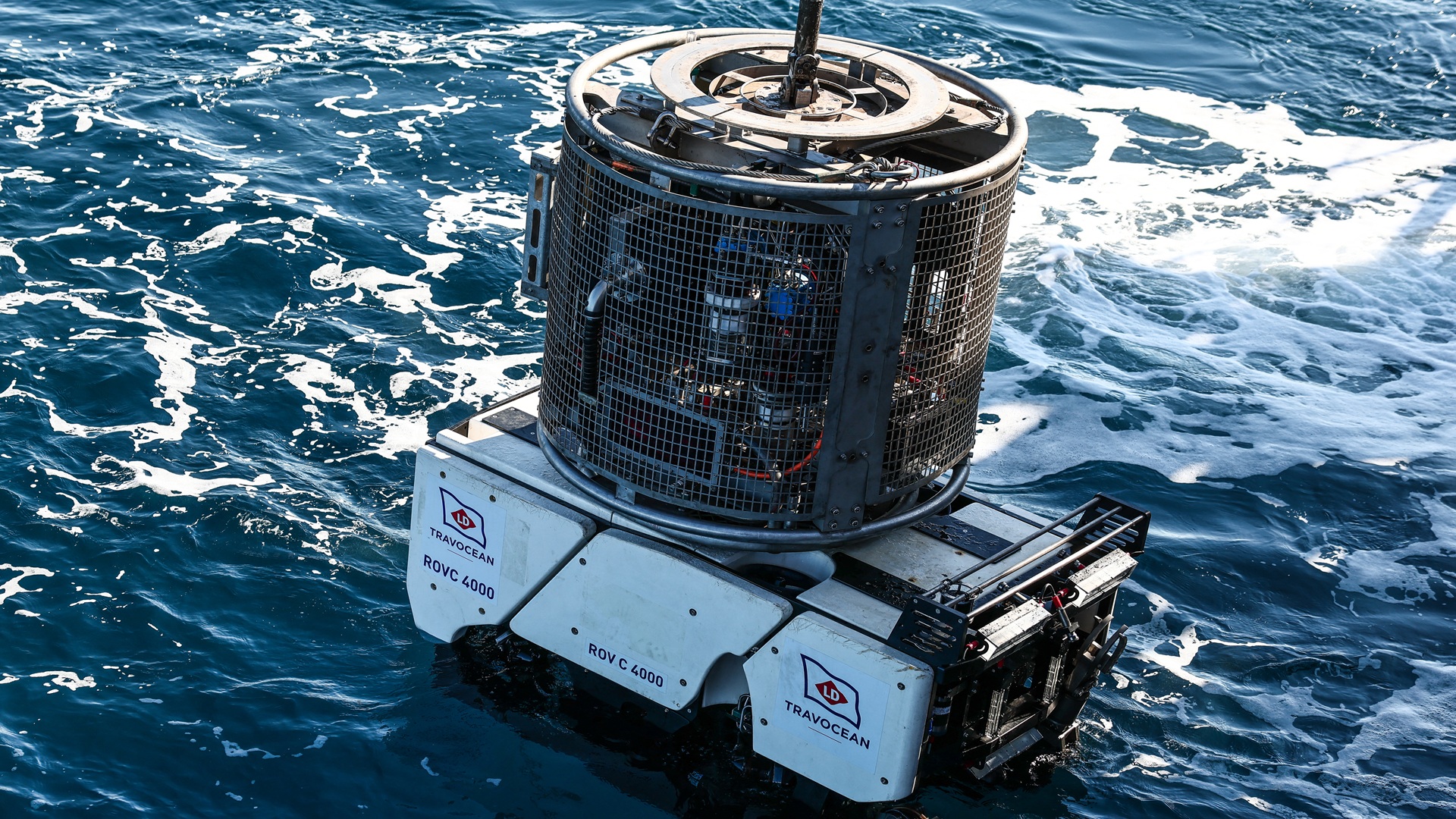
Die im Kandidaten-Summary genannte Tiefe von mehr als 1,5 Meilen reicht aus, um den Einsatz ebenso als Robotik- wie als Archäologiegeschichte einzuordnen. Menschliche Taucher können unter solchen Bedingungen nicht arbeiten. Damit bleiben ferngesteuerte oder autonome Systeme für Beobachtung, Navigation und Bergung zuständig. In diesem Sinne erweitert jede erfolgreiche Tiefseeerkundung dieser Art den Einsatzbereich robotischer Plattformen, statt nur einen weiteren wissenschaftlichen Bilddatensatz zu erzeugen.
Der Einsatz eines ferngesteuerten Roboters spiegelt auch ein breiteres Betriebsmodell wider, das bei Arbeiten in Extremumgebungen zunehmend üblich ist. Statt Menschen in die Gefahrenzone zu schicken, bauen Teams Sensor-, Steuer- und Manipulationssysteme, die in der Tiefe arbeiten können, während Experten den Datenstrom von der Oberfläche aus analysieren. Dieser Ansatz senkt das Risiko und erhöht die Ausdauer, zwei der Hauptgründe, warum sich Unterwasserrobotik weiter in Wissenschaft, Infrastruktur und Exploration ausbreitet.
Artefakte und Kontext
Die Zusammenfassung des Berichts sagt außerdem, dass der Roboter Artefakte aus dem Wrack geborgen hat. Bergung wirft immer zwei parallele Fragen auf: Welche Objekte wurden heraufgeholt, und welche Kontextinformationen wurden dabei bewahrt. Da der bereitgestellte Quellenauszug begrenzt ist, ist der wichtigste bestätigte Punkt schlicht, dass die Mission Kartierung und Bergung kombiniert hat. Schon diese Kombination ist bedeutend. Sie bedeutet, dass sich der Einsatz nicht auf visuelle Aufklärung beschränkte und direkt mit der Fundstelle interagieren konnte.
Für Innovationsbeobachter ist genau diese direkte Interaktion das wichtige technische Signal. Bildsysteme helfen beim Verständnis, aber Bergung erfordert eine weitere Ebene an Präzision. Objekte aus extremer Tiefe zu greifen, anzuheben und zu transportieren, ohne sie zu beschädigen, ist anspruchsvoll, vor allem wenn die Materialien fragil und historisch wichtig sein könnten.
Ein Modell für künftige Einsätze in Extremumgebungen
Geschichten wie diese erinnern daran, dass Innovation nicht nur in Laboren und Rechenzentren stattfindet. Sie findet auch an Orten statt, an denen der Zugang selbst das Problem ist. Ein Roboter, der ein jahrhundertealtes Wrack detailliert dokumentieren und Artefakte aus mehr als 1,5 Meilen Tiefe bergen kann, steht zugleich für Fortschritte bei Mobilität, Sensorik und Fernmanipulation.
Das ist über die maritime Geschichte hinaus relevant. Dieselben technischen Familien, die tiefseearchäologische Arbeit ermöglichen, prägen oft auch industrielle Inspektion, Unterwasser-Energieoperationen, Umweltmonitoring und andere Missionen, in die Menschen nicht ohne Weiteres gelangen können. Die konkrete Fracht dieser Mission mag historisch sein, doch die Plattformlogik ist zeitgenössisch und weithin relevant.
Mindestens beschreibt der Kandidat eine Mission, die drei Dinge zugleich erreicht hat: Zugang zu extremer Tiefe, massive Bildaufnahme und Artefaktbergung. Das reicht aus, um sie als bedeutsamen Meilenstein der Robotik und als nützliches Beispiel dafür zu markieren, wie ferngesteuerte Systeme das erweitern, was sich aus einigen der schwer zugänglichen Umgebungen des Planeten erkunden, aufzeichnen und physisch bergen lässt.
Dieser Artikel basiert auf einer Berichterstattung von Interesting Engineering. Den Originalartikel lesen.
Originally published on interestingengineering.com