Die ingenieurmäßige Herausforderung, sich wie ein Mensch zu bewegen
Menschliche Muskeln arbeiten nicht isoliert. Jede Bewegung beinhaltet Dutzende von Muskeln, die in präzisen Abläufen koordiniert sind, wobei einzelne Muskeln an verschiedenen Punkten einer Bewegung unterschiedliche Kraftprofile liefern. Dieser verteilte, koordinierte Ansatz der Bewegung ist das, was menschliche und tierische Bewegungen ihre fließende, adaptive Qualität verleiht — und das ist es, was die Replikation dieser Bewegung in Maschinen so schwierig gemacht hat.
Traditionelle robotische Antriebssysteme verlassen sich auf Motoren und Servos, die Bewegung aus diskreten, zentralisierten Antriebseinheiten erzeugen. Diese Systeme sind hervorragend für präzise, wiederholte industrielle Aufgaben geeignet, aber sie erzeugen Bewegungen, die sich mechanisch anfühlen, weil sie es sind: ein paar Motoren führen die Arbeit durch, anstatt ein verteiltes Netzwerk vieler Aktuatoren, die zusammenarbeiten.
Forscher der Universität Bristol haben einen anderen Ansatz gewählt. Ihr künstliches Motorsystem besteht aus einem Netzwerk einfacher mechanischer Motoren, deren kollektives Verhalten aus ihren Wechselwirkungen hervorgeht, anstatt von zentraler Kontrolle. Das Ergebnis ist eine Bewegung, die die verteilte Dynamik biologischer Muskelsysteme eng nachahmt.
So funktioniert das System
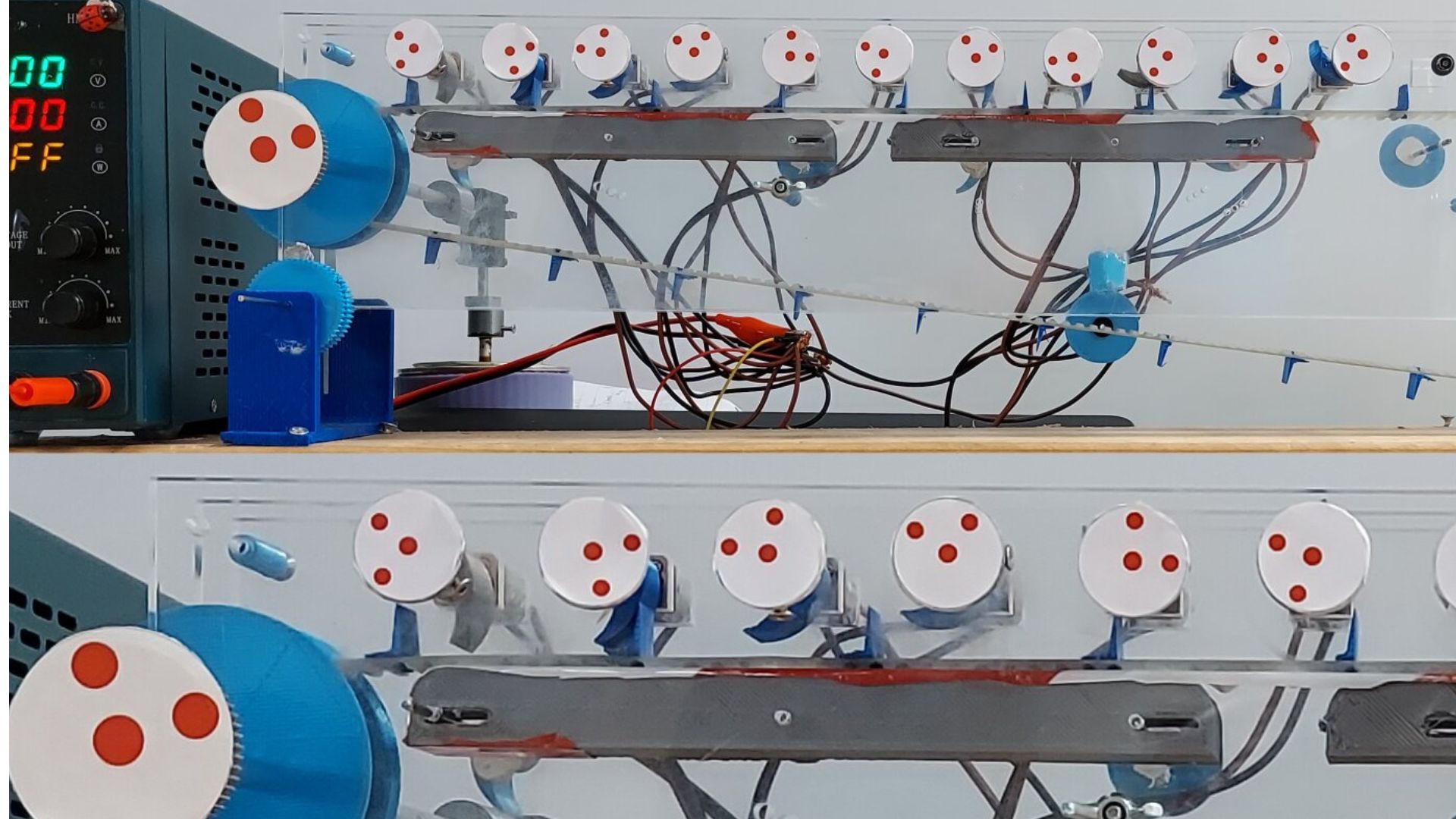
Das Bristol-Motornetzwerk besteht aus relativ einfachen einzelnen Aktuatoren — ähnlich im Prinzip den Motoreinheiten, die biologische Muskeln ausmachen. Jeder einzelne Aktuator ist in seinen Fähigkeiten begrenzt, aber wenn sie in einem Netzwerk verbunden sind, erzeugt das System als Ganzes Verhaltensweisen, die kein einzelner Aktuator allein erzeugen könnte.
Dies spiegelt die Architektur biologischer Muskeln wider. Eine menschliche Muskelfaser kann sich zusammenziehen oder entspannen, aber die gestufte Kraftabgabe und sanfte Bewegung, die wir erleben, ergibt sich aus der Rekrutierung verschiedener Anzahlen von Fasern zu verschiedenen Zeiten. Das Bristol-System wendet dieses Prinzip auf mechanische Aktuatoren an und nutzt Netzwerk-Wechselwirkungen statt komplexer einzelner Einheiten, um anspruchsvolle kollektive Verhaltensweisen zu erzeugen.
Anstatt präzise Trajektorien und Kraftprofile zentral zu programmieren, können Controller höherwertige Befehle ausgeben und die Netzwerk-Dynamik die Koordinationsdetails bewältigen. Dies ist robuster gegenüber unerwarteten Lasten und Umgebungsvariationen als traditionelle Kontrollansätze.

Anwendungen in der Softrobotik
Softrobotik — Roboter aus nachgiebigen Materialien statt starren Strukturen — hat sich als eines der aktivsten Forschungsgebiete der Robotik herausgestellt. Softroboter können sicherer mit Menschen interagieren, durch enge oder unregelmäßige Räume navigieren und empfindliche Objekte ohne das Risiko starrer Manipulatoren handhaben.
Die Herausforderung für die Softrobotik war die Antriebstechnik. Die meisten Softaktuatorsysteme sind schwer präzise zu steuern und neigen dazu, relativ langsame, begrenzte Bewegungen zu erzeugen. Ein künstliches Motornetzwerk, das viele Aktuatoren für dynamischere, natürlichere Bewegungen koordinieren kann, könnte erheblich erweitern, was Softroboter tun können.
Prothesen und tragbare Geräte
Eines der unmittelbarsten Anwendungsgebiete sind Prothesen. Auch fortgeschrittene myoelektrische Prothesen-Gliedmaßen wirken oft mechanisch in Wegen, die Benutzer frustrierend finden. Eine Prothese, die auf künstlichen Motornetzwerk-Prinzipien aufgebaut ist, könnte natürlichere Bewegungsdynamik erzeugen und flexibler an die Lasten und Kontexte des täglichen Lebens angepasst werden.
Die verteilte Art der Kontrolle bietet auch potenzielle Vorteile in Robustheit — wenn einzelne Aktuatoreinheiten ausfallen, kann das Netzwerk kompensieren, anstatt dass das ganze Gliedmaße die Funktion verliert. Tragbare Rehabilitationsgeräte, die die menschliche Bewegung unterstützen, stellen eine weitere kurzfristige Anwendung dar, insbesondere für die Schlaganfall-Genesung und Mobilitätsunterstützung.

Der Weg zur Einsatzbereitschaft
Die Bristol-Forschung befindet sich in einem frühen Stadium — Demonstration des Prinzips und Charakterisierung des Systemverhaltens statt Herstellung einsatzbereiter Geräte. Der Weg von der Laborbeweis zum Einsatz in kommerziellen Prothesen oder Rehabilitations-Wearables beinhaltet umfangreiche technische Entwicklung, behördliche Genehmigung und klinische Validierung.
Aber das zugrunde liegende Konzept — Anwendung biologischer Prinzipien der verteilten Muskelkoordinierung auf mechanische Systeme — ist verlockend genug, dass mehrere Forschungsgruppen und Medizingerätehersteller es wahrscheinlich verfolgen werden. Wenn Softroboter mit künstlichen Motornetzwerken schließlich mit etwa der Natürlichkeit biologischer Gliedmaßen bewegen können, wird sich die Spanne der Aufgaben, die sie neben Menschen ausführen können, dramatisch erweitern.
Dieser Artikel basiert auf Berichten von Interesting Engineering. Lesen Sie den Originalartikel.
Originally published on interestingengineering.com