Robotikunternehmen blicken über rohe Vision hinaus auf ein tieferes räumliches Verständnis
Brain Corp und die University of California, San Diego erweitern ihre Forschungskollaboration, um zu verbessern, wie autonome Roboter komplexe Umgebungen verstehen. Im Mittelpunkt steht semantisches Mapping und das, was die Partner als „kontextuelle Verankerungsschicht“ bezeichnen, eine digitale Darstellung physischer Räume, die Robotern helfen soll, ihre Umgebung in kommerziellen und industriellen Szenarien verlässlicher zu interpretieren.
Die Ankündigung erfolgt zu einem Zeitpunkt, an dem Robotikentwickler darum wetteifern, Vision-Language-Action-Systeme und andere generative KI-Systeme in reale Maschinen zu integrieren. Diese Modelle haben erweitert, was Roboter aus Bildern und Sprache ableiten können, doch die zentrale Frage lautet, ob sie dies mit genügend Konsistenz und Robustheit für den Einsatz in geschäftigen, unvorhersehbaren Umgebungen tun können.
Warum Brain Corp und UC San Diego glauben, dass Karten weiterhin wichtig sind
Laut der bereitgestellten Quelle vertritt die Zusammenarbeit die Auffassung, dass kontextuelle 3D-Semantik-Karten auch dann unverzichtbar bleiben, wenn die Branche KI-Systeme erforscht, die direkter mit visuellen Daten arbeiten. Mit anderen Worten: Reichhaltigere Wahrnehmung macht strukturiertes räumliches Verständnis nicht überflüssig. Sie kann diesen Bedarf sogar noch dringlicher machen.
Das ist eine bedeutende Haltung in einem Bereich, der zunehmend von End-to-End-KI begeistert ist. Wenn die Partnerschaft recht hat, hängt der Weg zu praktischer Autonomie nicht nur von größeren Modellen ab, sondern auch von robusten Weltmodellen, die Maschinen sagen, was Objekte sind, wo sie sich befinden und wie sie mit den Aufgaben zusammenhängen, die ein Roboter auszuführen versucht.
Von SLAM zu situativem Bewusstsein
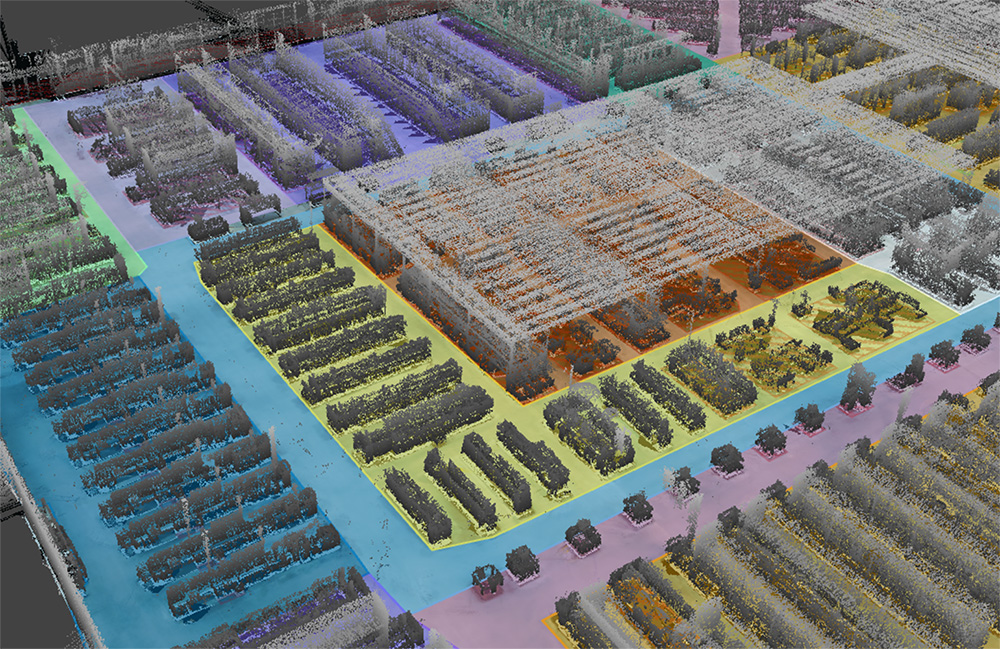
Simultane Lokalisierung und Kartierung, kurz SLAM, half Robotern dabei, von festen Industriezellen in dynamische Räume zu gelangen, indem sie Karten beim Navigieren erstellen und aktualisieren konnten. Der nächste Schritt besteht, wie die Partner ihn skizzieren, darin, diesen Karten mehr semantische und kontextuelle Tiefe zu geben. Das bedeutet, über die Geometrie hinaus zum Verständnis zu gehen: nicht nur ein Flur, sondern ein Flur mit Menschen, Hindernissen, Arbeitsabläufen und sich ändernden Betriebsregeln.
Die Quelle beschreibt die kontextuelle Verankerungsschicht als intelligente digitale Darstellung, die Roboter, Drohnen und selbstfahrende Fahrzeuge unterstützen könnte. Der versprochene Nutzen ist ein so starkes Situationsbewusstsein, dass fortschrittliche KI-Systeme in physischer Umgebung, die mit Menschen geteilt wird, intuitiv und sicher reagieren können.
Das kommerzielle Problem hinter der Forschung
Die Attraktivität dieser Richtung ist pragmatisch. Viele Robotikfehler entstehen nicht, weil ein System in einem Labor kein Objekt erkennen kann. Sie entstehen, weil reale Räume unübersichtlich, umkonfigurierbar und sozial komplex sind. Regale verschieben sich, Wagen tauchen auf, Menschen unterbrechen Abläufe, und die Lichtverhältnisse ändern sich. Ein Roboter, der Bilder klassifizieren kann, diese Informationen aber nicht in einem dauerhaften räumlichen Kontext verankern kann, ist schwerer zu vertrauen.
Die operative Reichweite von Brain Corp gibt dem Projekt einen realen Einsatzhintergrund. Die Quelle nennt mehr als 50.000 weltweit eingesetzte Roboter, was bedeutet, dass das Unternehmen von einer bestehenden installierten Basis und nicht nur von Forschungsprototypen ausgeht. Das ist wichtig, weil es darauf hindeutet, dass die Partnerschaft auf kommerziell relevante Autonomie und nicht nur auf akademisches Benchmarking abzielt.
Ein Mittelweg für physische KI
Die Zusammenarbeit spiegelt auch einen breiteren Strategiewandel in der Robotik wider. Die Branche sucht zunehmend nach einem Mittelweg zwischen fragiler, auf einzelne Aufgaben zugeschnittener Automatisierung und überambitionierter allgemeiner KI. Kontextuelles Mapping ist ein Kandidat für diese Zwischenschicht. Es kann Struktur und Sicherheit bewahren und gleichzeitig flexibleres Verhalten darüber ermöglichen.
Ob dieser Ansatz grundlegend wird, hängt von der Umsetzung ab, vor allem davon, wie gut diese reichhaltigeren Karten skaliert, aktualisiert und mit sich schnell weiterentwickelnden KI-Modellen integriert werden. Doch die Grundidee ist stimmig: In der Robotik geht es bei Intelligenz nicht nur ums Sehen. Es geht darum, Wahrnehmung in einem stabilen Modell der Welt zu verankern. Brain Corp und UC San Diego setzen darauf, dass genau diese Ebene und nicht allein die reine Modellgröße die nächste Generation autonomer Systeme außerhalb kontrollierter Umgebungen einsetzbar machen könnte.
Dieser Artikel basiert auf einer Berichterstattung von The Robot Report. Den Originalartikel lesen.
Originally published on therobotreport.com

