Lidar-এর কাজ এখন শুধু আকার-আকৃতি ম্যাপ করা নয়
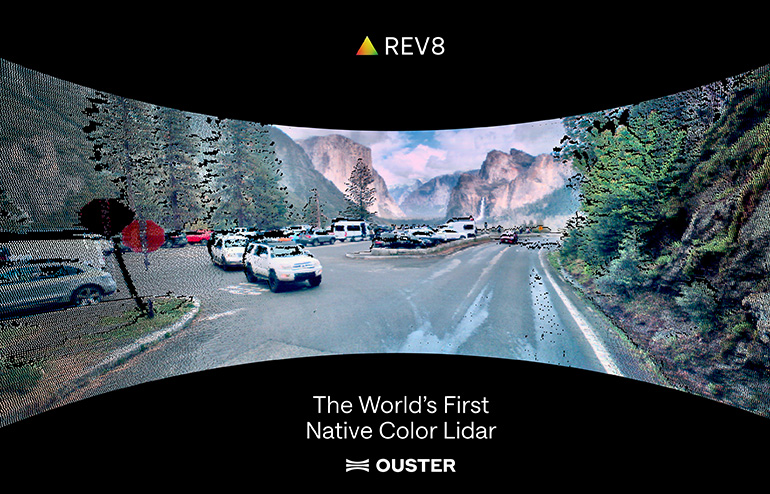
Ouster তাদের Rev8 family of OS digital lidar sensors চালু করেছে, যেখানে কোম্পানির দাবি অনুযায়ী রয়েছে বিশ্বের প্রথম native-color lidar এবং core sensing performance-এ উল্লেখযোগ্য অগ্রগতি। উপলব্ধ source text অনুযায়ী, Rev8-এ Ouster-এর next-generation L4 silicon ব্যবহৃত হয়েছে এবং এটি আগের generation-এর তুলনায় range ও resolution উভয় ক্ষেত্রেই up to double পর্যন্ত পৌঁছায়। এই সমন্বয় release-টিকে কেবল component refresh নয়, বরং robotic perception কীভাবে বিকশিত হচ্ছে তার একটি strategic move-ও করে তোলে।
এই launch-এর পেছনের মূল ধারণা সহজ: machines-এর এখন শুধু বেশি points নয়, বেশি context-সহ পৃথিবীকে বুঝতে হবে। Traditional lidar structure, distance, এবং geometry-এর জন্য মূল্যবান। Cameras color এবং texture দেয়। Rev8 নিয়ে Ouster-এর বক্তব্য হলো, lidar-এ সরাসরি color যুক্ত করা perception stack-টিকেই বদলে দেয়, ফলে autonomous systems তারা যা দেখছে তার আরও সমৃদ্ধ ব্যাখ্যা পায়, আর developers-কে উপরের স্তরে এতগুলো আলাদা sensor interpretation একত্র করতে হয় না।
কাগজে Rev8 কী বদলায়
উপলব্ধ source text Rev8-কে কেন foundational release হিসেবে দেখছে, তার বিস্তারিত technical case দেয়। নতুন family L4 Ouster Silicon-এর উপর তৈরি এবং এতে 128-channel L4 ও 256-channel L4 Max architectures দুটিই রয়েছে। Ouster বলছে, platform-টি functional safety, reliability, affordability, এবং scale-এর জন্য ডিজাইন করা হয়েছে। কোম্পানি আরও বলছে, নতুন architecture color data process করতে পারে, hardware-enabled HDR প্রদান করে, এবং up to 10.4 million points per second-এর সাথে 22.4 gigabits per second off-chip bandwidth সমর্থন করে।
এই specifications গুরুত্বপূর্ণ, কারণ বহু autonomy program-এ perception systems bottleneck হয়ে উঠেছে। আরও ভালো range earlier detection-এ সাহায্য করে। Higher resolution scene detail উন্নত করে। বেশি processing capability অগ্রহণযোগ্য latency ছাড়াই আরও তথ্য ব্যবহারের সুযোগ দেয়। এই সুবিধাগুলো একসঙ্গে এলে developers প্রতিটি sensor position থেকে বেশি কাজ করতে পারেন এবং robotics sensing-কে দীর্ঘদিন ধরে সংজ্ঞায়িত কিছু tradeoff কমাতে পারেন।
Ouster CEO Angus Pacala এই release-কে বিস্তৃতভাবে ব্যাখ্যা করে Rev8-কে কোম্পানির এখন পর্যন্ত সবচেয়ে advanced lidar sensor family বলে উল্লেখ করেছেন এবং বলেছেন যে native-color lidar আগামী physical AI যুগে machines-কে “3D human-like sight” দেবে। এই ভাষা উচ্চাকাঙ্ক্ষী, তবে এটি কোম্পানির বৃহত্তর কৌশলের সঙ্গে সামঞ্জস্যপূর্ণ, যেখানে তারা কেবল lidar component vendor হিসেবে সীমাবদ্ধ থাকতে চায় না।

Sensor vendor থেকে platform supplier-এ
source text-এর সবচেয়ে প্রকাশক অংশ color দাবিটি নয়, বরং এর ব্যবসায়িক প্রেক্ষাপট। Ouster সম্প্রতি StereoLabs-কে $38 million-এ অধিগ্রহণ করেছে, যেটিকে Pacala systems বা platform business গড়ে তোলার অংশ হিসেবে বর্ণনা করেছেন। এটি robotics market-এ একটি বড় পরিবর্তনের সংকেত দেয়। কোম্পানিগুলো এখন আলাদা hardware block বিক্রি করার চেয়ে integration burden কমায় এমন perception solutions-এর দিকে বেশি ঝুঁকছে।
এটি বিশেষত physical AI বলে যে ক্ষেত্রটি অনেকে বর্ণনা করছেন, সেখানে বেশি প্রাসঙ্গিক: এমন systems যাদের commercial scale-এ real environments-এ perceive, reason, এবং act করতে হয়। সেই প্রেক্ষাপটে customers আর cameras বনাম lidar কোনটি দার্শনিকভাবে superior সেই বিতর্কে আগ্রহী নয়। তারা এমন perception stack চায় যা কাজ করে। Ouster-এর framing-ও এই pragmatism প্রতিফলিত করে। Pacala বলেছেন cameras এবং lidars-কে একে অপরের প্রতিপক্ষ হিসেবে দেখা উচিত নয়, আর সঠিক প্রশ্ন হলো কোন কাজের জন্য কোন sensor উপযুক্ত।
তাই Rev8 একই সঙ্গে একটি product launch এবং positioning statement। Ouster যুক্তি দিচ্ছে যে lidar তার structural advantages বজায় রেখেও আরও context-aware হতে পারে। deployment-এ যদি এই দাবি টিকে যায়, তাহলে কোম্পানির বক্তব্য আরও শক্ত হবে যে ভবিষ্যতের robotic systems-এ narrowly defined components নয়, integrated sensing platforms প্রয়োজন হবে।
Physical AI-এ native color কেন গুরুত্বপূর্ণ
“Native color lidar” শব্দগুচ্ছ নজর কাড়ে, কারণ এটি robotics perception-এর একটি মূল সমস্যাকে সরাসরি স্পর্শ করে: geometry-কে semantic context-এর সঙ্গে কীভাবে মেলানো যায়। Structure robot-কে বলে objects কোথায় আছে এবং কত দূরে আছে। Color materials, markings, signals, এবং scene elements আলাদা করতে সাহায্য করতে পারে, যা navigation বা manipulation-এর জন্য গুরুত্বপূর্ণ হতে পারে। Ouster-এর যুক্তি হলো, এই তথ্যগুলো পরে loosely fuse করার বদলে একত্রিত হলে perception উন্নত হয়।
কোম্পানি বলছে, পুরো context পেতে structure এবং color দুটোই দরকার, তাই Rev8 AI perception-এ paradigm shift-এর প্রতিনিধিত্ব করে। এটি শক্তিশালী দাবি, কিন্তু কৌশলগতভাবে সঙ্গতিপূর্ণ। warehouses, streets, industrial sites, বা mixed human environments-এ কাজ করা robots-এর শুধু obstacle detection যথেষ্ট নয়। তাদের আরও ভালো world models দরকার। যে sensors এই models-কে আরও সমৃদ্ধ ও আরও tightly aligned data দিতে পারে, তারা উল্লেখযোগ্য সুবিধা দিতে পারে।
এখন বাজার Rev8-কে execution-এর ভিত্তিতে বিচার করবে। native color বাস্তবে real-world autonomy উন্নত করে কি না, performance gains deployment পরিস্থিতিতে বজায় থাকে কি না, এবং customer-রা system-টিকে production at scale সমর্থন করার মতো যথেষ্ট reliable ও affordable মনে করে কি না, সেটাই মূল প্রশ্ন। Ouster ঘোষণাটিকে এই উদ্বেগগুলোর আগাম জবাব হিসেবে সাজিয়েছে, headline specifications-এর পাশাপাশি safety, reliability, এবং manufacturability-এর ওপর জোর দিয়ে।
এই দৃষ্টিভঙ্গি সঠিক। robotics-এ একটি impressive demo আর একটি viable product-এর মধ্যে দূরত্ব সাধারণত reliability, cost, এবং integration effort দিয়ে মাপা হয়। Rev8 গুরুত্বপূর্ণ, কারণ অন্তত প্রতিশ্রুতির স্তরে এটি এই তিনটিকেই address করে। যদি পণ্যটি বর্ণিতভাবে কাজ করে, তাহলে lidar-কে একটি specialized perception input থেকে broader physical AI stack-এ আরও কেন্দ্রীয় ভূমিকার দিকে ঠেলে দিতে পারে।
- Ouster next-generation L4 silicon ব্যবহার করে তাদের Rev8 OS lidar family চালু করেছে।
- কোম্পানির দাবি, Rev8-এ native-color lidar রয়েছে এবং আগের generation-এর তুলনায় range ও resolution up to double পর্যন্ত পৌঁছায়।
- এই platform autonomy, functional safety, এবং production-scale deployment-এর জন্য অবস্থান করছে।
- এই launch Ouster-এর component supplier থেকে perception platform business-এ broader shift-কে সমর্থন করে।
এই নিবন্ধটি The Robot Report-এর রিপোর্টিং-এর ভিত্তিতে তৈরি। মূল নিবন্ধটি পড়ুন.
Originally published on therobotreport.com