রোবোটিক্স কোম্পানিগুলি কাঁচা ভিশনের বাইরে গিয়ে আরও গভীর স্থানিক বোঝাপড়ার দিকে তাকাচ্ছে
Brain Corp এবং University of California, San Diego জটিল পরিবেশ স্বয়ংক্রিয় রোবটরা কীভাবে বোঝে তা উন্নত করতে তাদের গবেষণা সহযোগিতা বাড়াচ্ছে। কাজটি সেমান্টিক ম্যাপিং এবং অংশীদাররা যেটিকে “contextual grounding layer” বলে বর্ণনা করছে, সেটির ওপর কেন্দ্রীভূত; এটি ভৌত স্থানের একটি ডিজিটাল উপস্থাপনা, যার উদ্দেশ্য বাণিজ্যিক ও শিল্প পরিবেশে রোবটকে আশপাশ আরও নির্ভরযোগ্যভাবে ব্যাখ্যা করতে সাহায্য করা।
ঘোষণাটি এমন সময়ে এসেছে যখন রোবোটিক্স ডেভেলপাররা ভিশন-ল্যাঙ্গুয়েজ-অ্যাকশন এবং অন্যান্য জেনারেটিভ এআই সিস্টেমকে বাস্তব যন্ত্রে যুক্ত করার দৌড়ে রয়েছে। এই মডেলগুলো ছবি ও ভাষা থেকে রোবট কী অনুমান করতে পারে তা প্রসারিত করেছে, কিন্তু মূল প্রশ্ন হলো, ব্যস্ত, অনিশ্চিত পরিবেশে প্রয়োগের জন্য এগুলো যথেষ্ট ধারাবাহিকতা ও স্থিতিস্থাপকতা সহ তা করতে পারে কি না।
Brain Corp এবং UC San Diego কেন মনে করে ম্যাপ এখনও গুরুত্বপূর্ণ
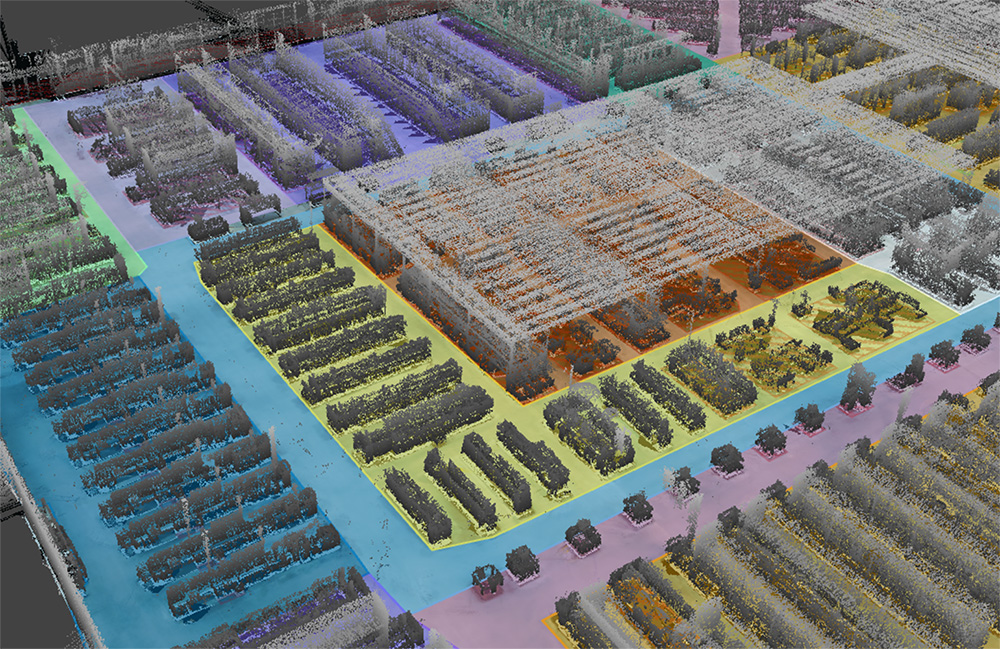
দেওয়া উৎস অনুযায়ী, এই সহযোগিতা মনে করে যে শিল্প ভিজ্যুয়াল ডেটা থেকে আরও সরাসরি পরিচালিত এআই সিস্টেম অন্বেষণ করলেও কনটেক্সচুয়াল 3D সেমান্টিক ম্যাপ এখনও অপরিহার্য। অন্য কথায়, সমৃদ্ধ উপলব্ধি কাঠামোবদ্ধ স্থানিক বোঝাপড়ার প্রয়োজন মুছে দেয় না। বরং সেই প্রয়োজন আরও জরুরি করে তুলতে পারে।
এটি এমন একটি ক্ষেত্রে গুরুত্বপূর্ণ অবস্থান, যেখানে এন্ড-টু-এন্ড এআই নিয়ে ক্রমবর্ধমান উচ্ছ্বাস রয়েছে। অংশীদারিত্বটি যদি সঠিক হয়, তবে ব্যবহারিক স্বায়ত্তশাসনের পথ কেবল বড় মডেলের ওপর নয়, বরং শক্তিশালী বিশ্ব মডেলের ওপরও নির্ভর করবে, যা যন্ত্রকে বলে দেয় বস্তু কী, সেগুলি কোথায় আছে, এবং রোবট যে কাজটি করতে চাইছে তার সঙ্গে সেগুলি কীভাবে সম্পর্কিত।
SLAM থেকে পরিস্থিতিগত সচেতনতা
Simultaneous localization and mapping, বা SLAM, স্থির শিল্প কোষ থেকে রোবটকে গতিশীল স্থানে নিয়ে যেতে সাহায্য করেছিল, কারণ এটি নেভিগেট করতে করতে মানচিত্র তৈরি ও হালনাগাদ করতে দিত। অংশীদারদের ভাষায়, পরবর্তী ধাপ হলো সেই মানচিত্রগুলোকে আরও সেমান্টিক ও কনটেক্সচুয়াল গভীরতা দেওয়া। এর মানে জ্যামিতির বাইরে গিয়ে বোঝাপড়ার দিকে অগ্রসর হওয়া: শুধু একটি করিডর নয়, বরং এমন একটি করিডর যেখানে মানুষ, বাধা, কর্মপ্রবাহ এবং পরিবর্তনশীল অপারেশনাল নিয়ম থাকে।
উৎস অনুযায়ী contextual grounding layer হলো একটি বুদ্ধিমান ডিজিটাল উপস্থাপনা, যা রোবট, ড্রোন এবং স্বচালিত যানকে সমর্থন করতে পারে। এর প্রতিশ্রুতি হলো এমন মাত্রার পরিস্থিতিগত সচেতনতা, যাতে উন্নত এআই সিস্টেম মানুষ-শেয়ার করা ভৌত পরিবেশে স্বাভাবিক ও নিরাপদভাবে সাড়া দিতে পারে।
গবেষণার পেছনের বাণিজ্যিক সমস্যা
এই দিকটির আকর্ষণ ব্যবহারিক। অনেক রোবোটিক্স ব্যর্থতা ঘটে না কারণ কোনো সিস্টেম ল্যাবরেটরিতে একটি বস্তুকে চিনতে পারে না। সেগুলো ঘটে কারণ বাস্তব জায়গা বিশৃঙ্খল, পুনর্গঠনযোগ্য এবং সামাজিকভাবে জটিল। তাক নড়ে, কার্ট আসে, মানুষ প্রবাহে বাধা দেয়, আর আলোর পরিস্থিতি বদলায়। এমন একটি রোবট, যে ছবি শ্রেণিবদ্ধ করতে পারে কিন্তু সেই তথ্যকে স্থায়ী স্থানিক প্রেক্ষাপটে নোঙর করতে পারে না, তাকে বিশ্বাস করা কঠিন।
Brain Corp-এর অপারেশনাল উপস্থিতি প্রকল্পটিকে বাস্তব মোতায়েনের পটভূমি দেয়। উৎসে বলা হয়েছে বিশ্বজুড়ে 50,000-এর বেশি রোবট মোতায়েন করা হয়েছে, অর্থাৎ কোম্পানি কেবল গবেষণা প্রোটোটাইপের ওপর নির্ভর করছে না। এটি গুরুত্বপূর্ণ, কারণ এতে বোঝা যায় অংশীদারিত্বটি কেবল একাডেমিক বেঞ্চমার্কিং নয়, বরং বাণিজ্যিকভাবে প্রাসঙ্গিক স্বায়ত্তশাসনের দিকেও লক্ষ্য করছে।
ভৌত এআই-এর জন্য একটি মধ্যপন্থা
এই সহযোগিতা রোবোটিক্স কৌশলে একটি বৃহত্তর পরিবর্তনও প্রতিফলিত করে। শিল্প এখন কঠোর, কাজ-নির্দিষ্ট অটোমেশন এবং অতিরিক্ত উচ্চাকাঙ্ক্ষী সাধারণ-উদ্দেশ্য এআই-এর মধ্যে একটি মধ্যপন্থা খুঁজছে। কনটেক্সচুয়াল ম্যাপিং সেই মধ্যস্তরের একটি সম্ভাব্য উপাদান। এটি উপরের স্তরে আরও নমনীয় আচরণ অনুমোদন করেও কাঠামো ও নিরাপত্তা ধরে রাখতে পারে।
এই পদ্ধতি ভিত্তিমূলক হবে কি না, তা বাস্তবায়নের ওপর নির্ভর করবে, বিশেষ করে এই সমৃদ্ধ মানচিত্রগুলো কতটা ভালোভাবে স্কেল করে, আপডেট হয় এবং দ্রুত বিবর্তিত এআই মডেলের সঙ্গে একীভূত হয়। কিন্তু মূল ধারণাটি সঠিক: রোবোটিক্সে বুদ্ধিমত্তা শুধু দেখা নয়। এটি উপলব্ধিকে বিশ্বের একটি স্থিতিশীল মডেলে নোঙর করা। Brain Corp এবং UC San Diego বাজি ধরছে যে এই স্তরটি, শুধু মডেলের আকার নয়, পরবর্তী প্রজন্মের স্বায়ত্তশাসিত সিস্টেমকে নিয়ন্ত্রিত পরিবেশের বাইরে মোতায়েনযোগ্য করে তুলতে পারে।
এই নিবন্ধটি The Robot Report-এর প্রতিবেদনের ভিত্তিতে লেখা। মূল নিবন্ধ পড়ুন.
Originally published on therobotreport.com