Underwater Robots Have a Communications Problem
Autonomous underwater vehicles can map, inspect, and explore places people cannot easily reach, but they still face a stubborn technical limitation: once they dive, reliable communication becomes difficult. Radio waves attenuate quickly underwater, especially in saltwater. Acoustic links work over longer distances, but they introduce distortion, echoes, and noise. Optical systems can move data quickly, yet they need line of sight and degrade in murky conditions.
That combination leaves many underwater robots operating with limited real-time contact. In many cases, they can exchange only sparse status signals or must surface to transmit meaningful data. A new system called BlueME, developed by researchers at the University of Florida and described by New Atlas, is designed to change that constraint.
A Different Physical Approach
BlueME centers on a magnetoelectric antenna rather than conventional underwater wireless methods. According to the source text, the system allows autonomous underwater vehicles to exchange data at distances of up to 730 meters while drawing roughly 10 watts of power. If those figures hold up in broader use, that would represent a notable tradeoff: meaningful range at low power without depending on surface resurfacing or noisy acoustic channels.
The idea emerged from a cross-disciplinary insight. Project co-lead Adam Khalifa had previously worked on miniature wireless implants and recognized that some of the physical challenges inside the human body resemble those found underwater. The body is largely composed of lightly salted water, which means solutions developed for transmitting through that medium may have analogs in marine communication.

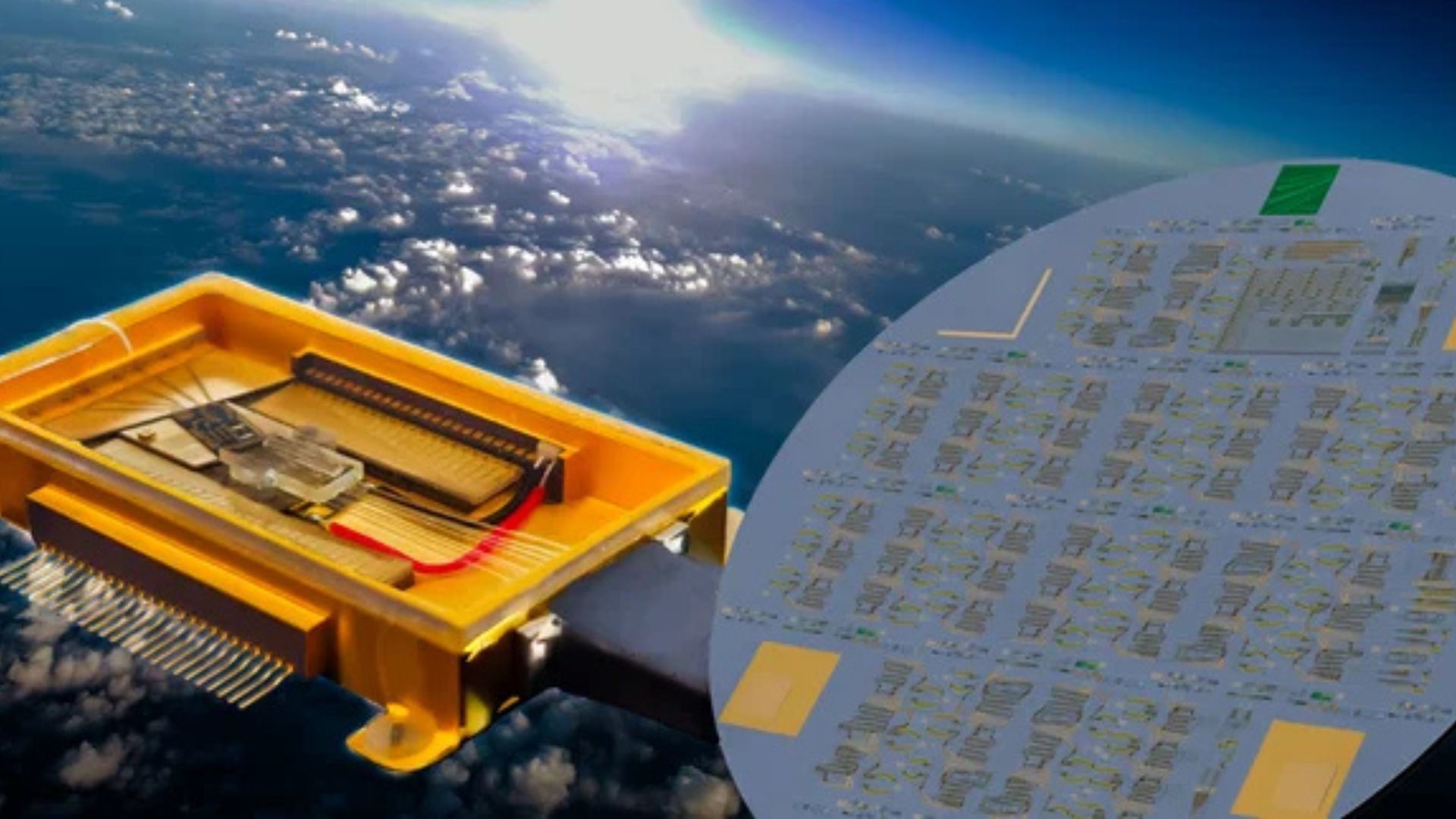
How the Antenna Works
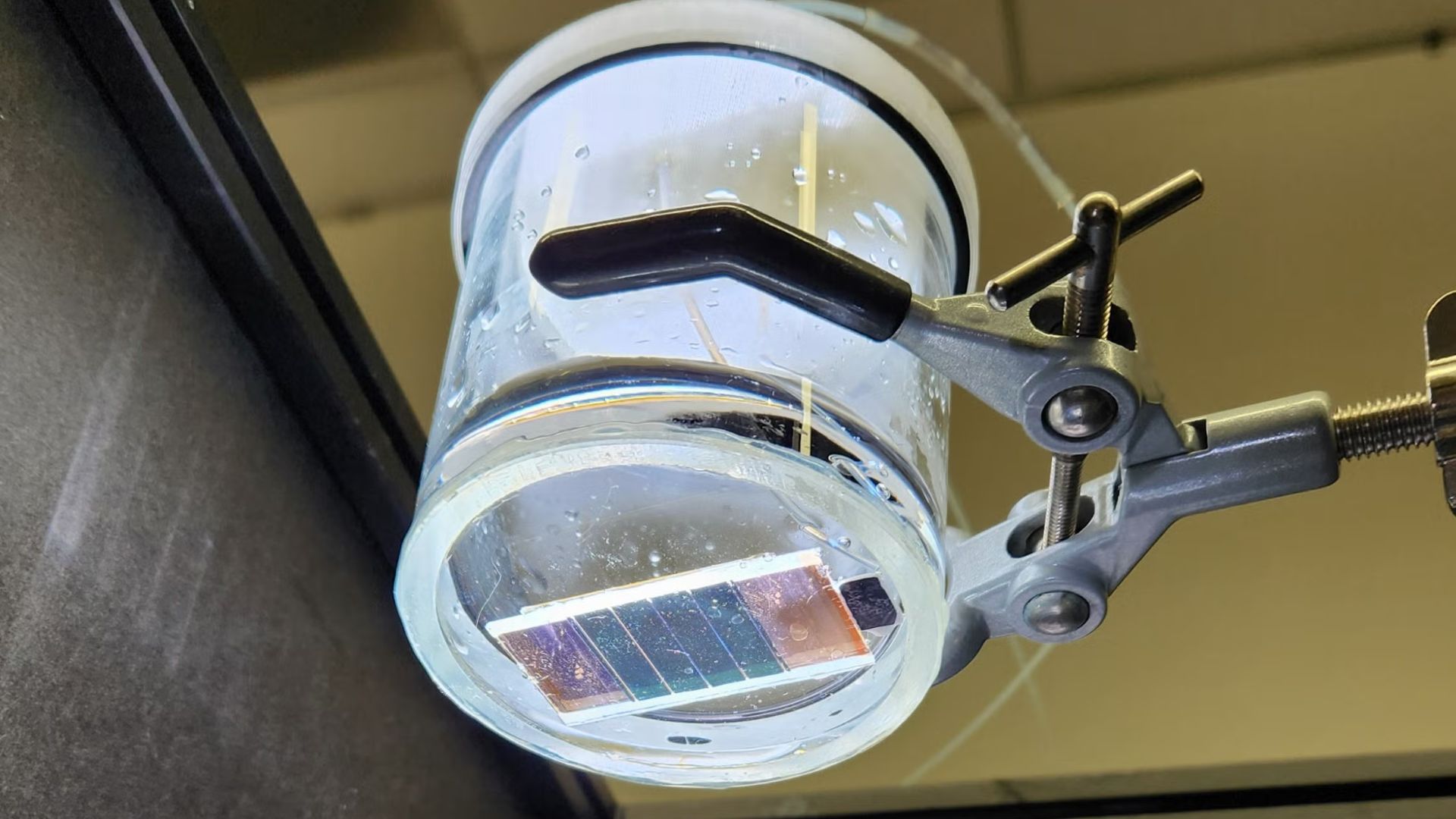
The source describes BlueME's core component as an antenna that couples two physical effects in sequence. A magnetic field deforms a magnetostrictive layer made from Metglas. That mechanical deformation then induces a voltage in an adjacent piezoelectric layer, identified as PZT. The arrangement is designed to convert between magnetic and electrical behavior in a compact package.
What makes that interesting is not just the materials science, but the application. Traditional radio systems struggle because seawater heavily attenuates electromagnetic signals. BlueME's magnetoelectric design aims to exploit a different operating regime, opening a path to more robust communication between submerged machines and surface operators.
Why This Could Matter for Autonomy
Communication limits are one of the reasons underwater robotics remains more constrained than aerial or terrestrial autonomy. A drone in the sky can maintain a high-bandwidth link. A robot under the ocean often cannot. That forces conservative mission planning, delayed decision cycles, and periodic surfacing that can disrupt operations or expose vehicles.
If underwater robots can exchange data reliably over hundreds of meters, some of those constraints begin to relax. Vehicles could coordinate with one another more effectively, pass updates without surfacing, and give operators a steadier picture of mission progress. That would be relevant for scientific surveying, infrastructure inspection, environmental monitoring, and other marine operations where continuity matters.
The Tradeoffs With Existing Methods
Each established underwater communication method comes with a compromise. Acoustic links travel farther but can suffer Doppler distortion, multipath interference, and environmental noise. Optical links are fast but fragile in real-world conditions. Radio links are typically too short-ranged to solve the broader problem. BlueME is being presented as a way to move into a more workable middle ground.
That does not mean it replaces every other system. In practice, underwater communications are likely to remain multi-modal, with different tools used for different ranges, bandwidth needs, and environments. But a low-power link with the reported range could become an important layer in that stack.
What We Know So Far
New Atlas says the work has been accepted in the IEEE Journal of Oceanic Engineering and references open-water trials at Lake Wauburg, Florida. That lends the project more weight than a purely conceptual demonstration, though it still sits at the stage where performance under broader operational conditions will matter.
The most important published numbers in the source are the reported 730-meter range and about 10-watt power draw. Those figures are compelling because marine systems constantly balance endurance, payload, and communications demands. A more efficient link could have downstream effects on mission design.

A Broader Pattern in Engineering
BlueME also reflects a larger pattern in emerging technology: useful breakthroughs often come from adapting ideas across domains rather than inventing every component from scratch. In this case, concepts shaped by implant communications helped inspire a marine robotics tool.
That kind of transfer is often where innovation becomes practical. The hardest part is not always discovering a new physical effect. It is spotting that an old solution in one medium may answer a longstanding problem in another.
The Next Test
The promise of BlueME is straightforward. Underwater robots need better ways to stay in touch, and current systems force difficult compromises. A magnetoelectric antenna that can maintain useful communication over long submerged distances with modest power could meaningfully expand what these vehicles can do.
The remaining question is whether the laboratory and trial results scale into varied real-world environments. If they do, underwater autonomy may become less isolated and much more capable.
This article is based on reporting by New Atlas. Read the original article.
Originally published on newatlas.com