Robotics companies are looking past raw vision toward deeper spatial understanding
Brain Corp and the University of California, San Diego are expanding their research collaboration to improve how autonomous robots understand complex environments. The work is centered on semantic mapping and what the partners describe as a “contextual grounding layer,” a digital representation of physical spaces intended to help robots interpret surroundings more reliably in commercial and industrial settings.
The announcement arrives at a moment when robotics developers are racing to incorporate vision-language-action and other generative AI systems into real-world machines. Those models have expanded what robots can infer from images and language, but the central question is whether they can do so with enough consistency and resilience for deployment in busy, unpredictable environments.
Why Brain Corp and UC San Diego think maps still matter
According to the supplied source, the collaboration takes the position that contextual 3D semantic maps remain essential even as the industry explores AI systems operating more directly from visual data. In other words, richer perception does not eliminate the need for structured spatial understanding. It may make that need more urgent.
That is a significant stance in a field increasingly excited by end-to-end AI. If the partnership is right, the path to practical autonomy will depend not only on bigger models, but also on robust world models that tell machines what objects are, where they are, and how they relate to the tasks a robot is trying to perform.
From SLAM to situational awareness
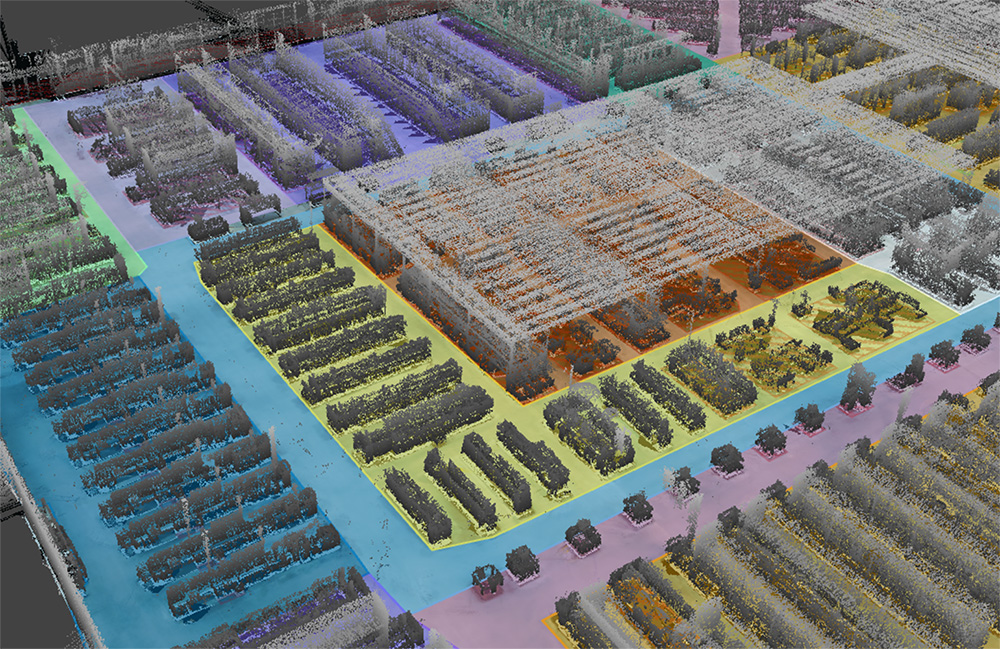
Simultaneous localization and mapping, or SLAM, helped move robots from fixed industrial cells into dynamic spaces by allowing them to build and update maps while navigating. The next step, as framed by the partners, is giving those maps more semantic and contextual depth. That means moving beyond geometry into understanding: not just a hallway, but a hallway with people, obstacles, workflows, and changing operational rules.
The source describes the contextual grounding layer as an intelligent digital representation that could support robots, drones, and self-driving vehicles. The promised payoff is situational awareness strong enough to let advanced AI systems respond intuitively and safely in physical environments shared with people.
The commercial problem behind the research
The appeal of this direction is practical. Many robotics failures do not happen because a system cannot recognize an object in a lab. They happen because real spaces are messy, reconfigurable, and socially complex. Shelves move, carts appear, people interrupt flows, and lighting conditions change. A robot that can classify images but cannot anchor that information in a persistent spatial context is harder to trust.
Brain Corp’s operational footprint gives the project a real deployment backdrop. The source cites more than 50,000 robots deployed globally, which means the company is working from an installed base rather than only from research prototypes. That matters because it suggests the partnership is aimed at commercially relevant autonomy, not just academic benchmarking.
A middle path for physical AI
The collaboration also reflects a broader shift in robotics strategy. The industry is increasingly searching for a middle path between brittle task-specific automation and overly ambitious general-purpose AI. Contextual mapping is one candidate for that middle layer. It can preserve structure and safety while still allowing more flexible behavior on top.
Whether that approach becomes foundational will depend on execution, especially how well these richer maps scale, update, and integrate with rapidly evolving AI models. But the core idea is sound: in robotics, intelligence is not only about seeing. It is about grounding perception in a stable model of the world. Brain Corp and UC San Diego are betting that this layer, rather than raw model size alone, may be what makes the next generation of autonomous systems deployable outside controlled environments.
This article is based on reporting by The Robot Report. Read the original article.
Originally published on therobotreport.com