NASA spotlights indoor tools for autonomy and flight testing
NASA has published a closer look at indoor testing facilities available at the NASA Unmanned Autonomy Research Complex, or NUARC, at Ames Research Center. The image article focuses on two core capabilities: a large programmable WindShaper fan array for generating controlled airflow conditions and a companion WindProbe system for mobile wind data collection.
Although the post is concise, it offers a useful snapshot of the kind of infrastructure NASA is making available for low-speed and hovering flight research. The facilities are designed to help researchers study aircraft behavior under repeatable conditions, especially in environments where wind, gusts, and gradients can make autonomous or uncrewed operations difficult to validate outdoors.
A fan wall built for controlled wind research
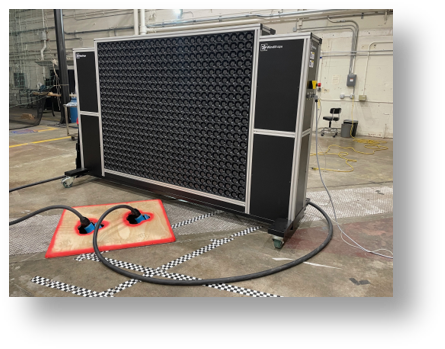
The most prominent system featured is the WindShaper, described as a large fan array available for dynamic low-speed and hovering flight research. NASA says the setup is ideal for generating arbitrary wind gradients and wind gusts through a simple Python API, which means researchers can program and reproduce specific airflow conditions rather than relying on natural weather.
According to the agency, the array measures 9 feet by 7 feet and includes 1,134 fans arranged as 567 “wind pixels.” That architecture matters because it turns the wall into a controllable field rather than a single uniform blower. By adjusting the fans programmatically, researchers can recreate steady winds, abrupt gusts, and more complex gradients that better resemble the kinds of disturbances aircraft encounter in real environments.
NASA lists the wind speed range as 0 to 16 meters per second, equivalent to 0 to 36 miles per hour or 31 knots. The system is also rated for acceleration of 4 meters per second squared and deceleration of 2.5 meters per second squared. Those figures suggest a capability not just to hold set conditions, but to vary them dynamically enough to test control responses and stability.
Why programmable wind matters
Indoor wind generation is especially relevant for autonomy research because it lets developers isolate variables. Outdoor testing remains essential, but it is inherently harder to repeat with precision. A programmable array offers a bridge between simulation and field trials by creating a physical environment that can be adjusted, measured, and rerun as many times as needed.
That has practical value for drones, hovering systems, and other low-speed aircraft that can be highly sensitive to local airflow. Gusts and directional gradients can challenge navigation, perception, and control systems. Being able to deliberately create those conditions with a script is a meaningful research advantage.

WindProbe adds mobile measurement inside the lab
NASA's post also highlights a companion WindProbe designed for quick surveys of flows. Rather than acting as a fixed instrument, the probe is intended for handheld mobile data collection, allowing users to map wind conditions across different parts of the indoor test environment.
The agency says the WindProbe uses the lab's OptiTrack motion capture system to extract the position and orientation of the 5-hole cone probe located on the tip. That combination is important because wind data becomes more useful when the exact position and orientation of the sensor are known. Motion capture provides the spatial reference needed to understand how airflow varies across the test area.
In effect, the WindProbe appears to serve as a verification and survey tool for the environment that the WindShaper creates. If researchers program a certain gradient or gust profile, a mobile probe can help confirm what the flow field actually looks like in space. That closes an important loop between commanded conditions and measured conditions.
Part of a broader push in autonomy research
The facility description signals the kind of work NASA is supporting as uncrewed systems become more capable and more complex. Autonomy research increasingly depends on testing environments that sit between software simulation and open-air flight. Indoor labs with programmable disturbances allow teams to test not only whether an aircraft can fly, but how reliably it can respond when the environment changes.
That is particularly relevant for hovering and low-speed operations, where localized wind effects can have an outsized impact. It also matters for sensor validation, guidance logic, and recovery behavior in edge cases. When those behaviors can be tested against repeatable physical stimuli, researchers gain a clearer basis for comparing algorithms and designs.
NASA's emphasis on a Python API is also notable. It suggests the system is meant to integrate with modern experimental workflows in which test conditions can be scripted, automated, and synchronized with other measurement tools. That kind of interface lowers friction for researchers and makes parameter sweeps or repeated scenario testing more practical.
What the NUARC snapshot reveals
Even in short form, the NASA article reveals a testing philosophy centered on controllability, measurement, and iteration. The WindShaper creates tailored airflow conditions. The WindProbe measures those conditions with positional awareness through motion capture. Together, they provide an indoor platform for studying how aircraft and autonomy systems behave when the air around them is anything but static.
The post does not present a specific mission or research result. Instead, it highlights enabling infrastructure. That is often where future advances begin. Before new uncrewed capabilities can move into field deployment, they typically pass through environments where disturbances can be introduced deliberately and understood clearly. NUARC's featured equipment appears built for exactly that role.
For researchers working on dynamic low-speed flight, the value is straightforward: a large programmable wind field, measurable airflow, and a controlled indoor setting. For NASA, the article is a reminder that progress in autonomy depends not only on vehicles and software, but also on the quality of the environments used to test them.
This article is based on reporting by NASA. Read the original article.
Originally published on nasa.gov