The Engineering Challenge of Moving Like a Human
Human muscles don't work in isolation. Every movement involves dozens of muscles coordinating in precise sequences, with individual muscles contributing different force profiles at different points in a motion. This distributed, coordinated approach to movement is what gives human and animal motion its fluid, adaptive quality — and it's what has made replicating that motion in machines so difficult.
Traditional robotic actuation relies on motors and servos that produce motion from discrete, centralized drive units. These systems are excellent for precise, repetitive industrial tasks, but they produce movement that feels mechanical precisely because it is: a few motors doing the work rather than a distributed network of many actuators working together.
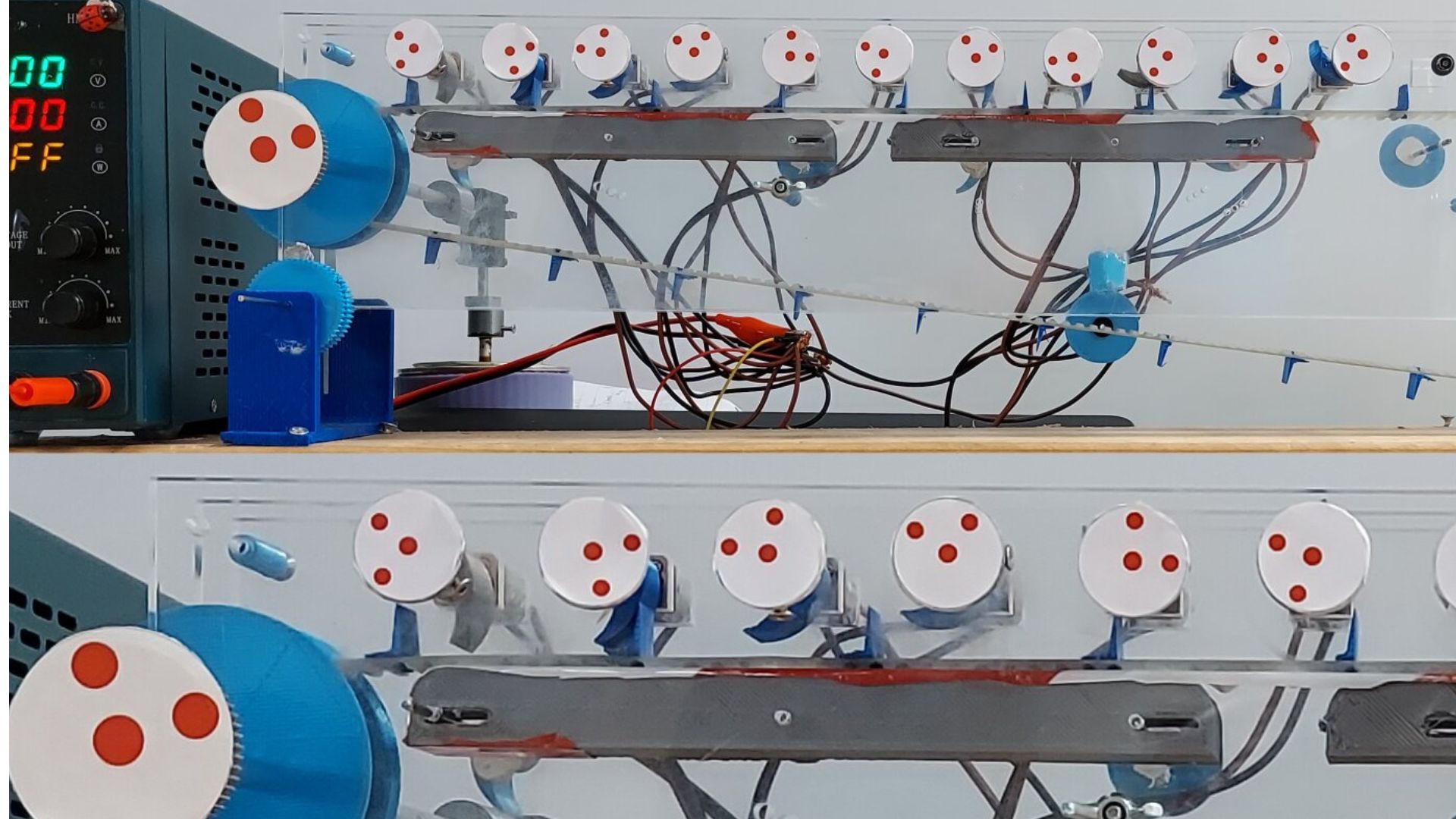
Researchers at the University of Bristol have taken a different approach. Their artificial motor system consists of a network of simple mechanical motors whose collective behavior emerges from their interactions rather than centralized control. The result is motion that closely mimics the distributed dynamics of biological muscle systems.
How the System Works
The Bristol motor network is built around relatively simple individual actuators — similar in principle to the motor units that make up biological muscles. Each individual actuator is limited in its capabilities, but when interconnected in a network, the system as a whole produces behaviors that no single actuator could generate.
This mirrors the architecture of biological muscle. A human muscle fiber can contract or relax, but the graded force output and smooth motion we experience comes from the recruitment of different numbers of fibers at different times. The Bristol system applies this principle to mechanical actuators, using network interactions rather than complex individual units to produce sophisticated collective behaviors.
Rather than programming precise trajectories and force profiles centrally, controllers can issue higher-level commands and allow the network dynamics to handle the coordination details. This is more robust to unexpected loads and environmental variations than traditional control approaches.

Applications in Soft Robotics
Soft robotics — robots made from compliant materials rather than rigid structures — has emerged as one of the most active areas of robotics research. Soft robots can interact more safely with humans, navigate through tight or irregular spaces, and handle delicate objects without the risk of rigid manipulators.
The challenge for soft robotics has been actuation. Most soft actuator systems are difficult to control precisely and tend to produce relatively slow, limited motions. An artificial motor network that can coordinate many actuators for more dynamic, natural motion could significantly expand what soft robots can do.
Prosthetics and Wearables
One of the most immediate application areas is prosthetics. Current prosthetic limbs, even advanced myoelectric designs, often feel mechanical in ways that users find frustrating. A prosthetic built on artificial motor network principles could produce more natural movement dynamics and adapt more flexibly to the loads and contexts of daily life.
The distributed nature of the control also offers potential advantages in robustness — if individual actuator units fail, the network can compensate, rather than the entire limb losing function. Wearable rehabilitation devices that assist human movement represent another near-term application, particularly for stroke recovery and mobility assistance.

The Path to Deployment
The Bristol research is at an early stage — demonstrating the principle and characterizing system behavior rather than producing deployable devices. The path from laboratory demonstration to commercial prosthetics or rehabilitation wearables involves substantial engineering, regulatory approval, and clinical validation.
But the underlying concept — applying biological principles of distributed muscle coordination to mechanical systems — is compelling enough that several research groups and medical device companies are likely to pursue it. If soft robots with artificial motor networks can eventually move with something approaching the naturalness of biological limbs, the range of tasks they can perform alongside humans will expand dramatically.
This article is based on reporting by Interesting Engineering. Read the original article.
Originally published on interestingengineering.com