Lidar ఇప్పుడు ఆకారాలను మ్యాప్ చేయడానికే కాదు, ఇంకా ఎక్కువ చేయాలి
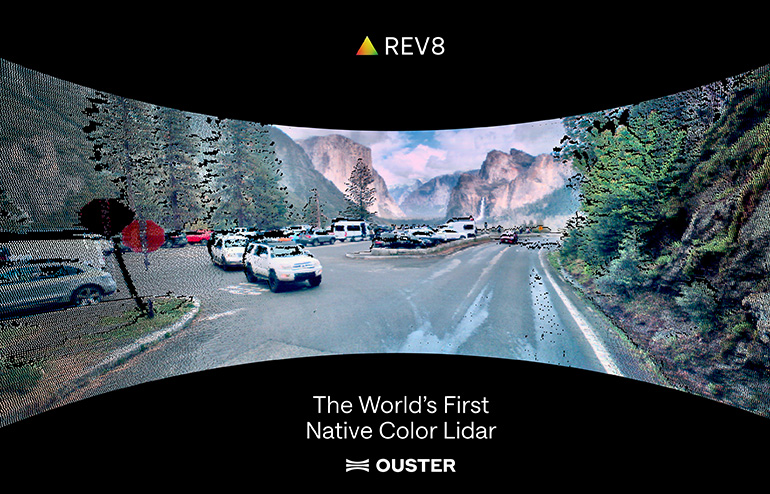
Ouster తన Rev8 family of OS digital lidar sensorsను ప్రారంభించింది. కంపెనీ ప్రకారం, ఇందులో ప్రపంచంలోనే మొదటి native-color lidar మరియు core sensing performanceలో గణనీయమైన పెరుగుదల ఉంది. అందుబాటులో ఉన్న source text ప్రకారం, Rev8లో Ouster యొక్క next-generation L4 silicon ఉపయోగించారు, మరియు ఇది గత generationతో పోలిస్తే range మరియు resolution రెండింటిలో up to double వరకు అందిస్తుంది. ఈ కలయిక, ఈ విడుదలను కేవలం component refreshగా కాకుండా, robotic perception ఎలా అభివృద్ధి చెందుతోందనే విషయంలో వ్యూహాత్మక అడుగుగా నిలబెడుతుంది.
ఈ launch వెనుక ఉన్న పెద్ద ఆలోచన సూటిగా ఉంది: machines ఇప్పుడు కేవలం ఎక్కువ points కాదు, మరింత contextతో ప్రపంచాన్ని అర్థం చేసుకోవాలి. సంప్రదాయ lidar structure, distance, geometry కోసం విలువైనదిగా నిలిచింది. Cameras color మరియు textureను ఇస్తాయి. Rev8తో colorను నేరుగా lidarలోకి తీసుకురావడం perception stackను మార్చేస్తుందని Ouster అంటోంది. దీని వల్ల autonomous systems వారు చూస్తున్నదానికి మరింత సమృద్ధమైన అర్థం లభిస్తుంది, పైస్థాయిలో అనేక sensor interpretationsను కలిపే అవసరం తగ్గుతుంది.
కాగితంపై Rev8 ఏమి మారుస్తుంది
ఉన్న source text ప్రకారం, Rev8ను ఎందుకు foundational releaseగా Ouster చూస్తుందో వివరమైన technical case ఉంది. కొత్త family L4 Ouster Siliconపై ఆధారపడింది మరియు ఇందులో 128-channel L4, 256-channel L4 Max architectures రెండూ ఉన్నాయి. ఈ platformను functional safety, reliability, affordability, scale కోసం రూపొందించినట్లు Ouster చెబుతోంది. కొత్త architecture color dataను process చేయగలదని, hardware-enabled HDRను అందిస్తుందని, అలాగే up to 10.4 million points per secondతో 22.4 gigabits per second off-chip bandwidthను support చేస్తుందని కూడా కంపెనీ తెలిపింది.
ఈ specifications ఎందుకు ముఖ్యమంటే, అనేక autonomy programsలో perception systems bottleneckలుగా మారాయి. మెరుగైన range early detectionను సహాయపడుతుంది. ఎక్కువ resolution scene detailను మెరుగుపరుస్తుంది. అధిక processing capability అంగీకరించలేని latency లేకుండా మరింత సమాచారాన్ని ఉపయోగించడానికి వీలు కల్పిస్తుంది. ఈ లాభాలు అన్నీ కలిసి వస్తే, developers ప్రతి sensor position నుండి మరింత చేయగలరు, అలాగే robotics sensingను చాలా కాలంగా నిర్వచిస్తున్న కొన్ని tradeoffsను తగ్గించగలరు.
Ouster CEO Angus Pacala ఈ విడుదలను విస్తృతంగా వివరించి, Rev8ను కంపెనీ ఇప్పటివరకు విడుదల చేసిన అత్యంత advanced lidar sensor familyగా అభివర్ణించారు. native-color lidar తదుపరి దశ physical AI కోసం machinesకు “3D human-like sight” అందిస్తుందని ఆయన వాదించారు. ఈ మాటలు ఆశావహంగా ఉన్నా, lidar component vendorకే పరిమితం కాకుండా ముందుకు వెళ్లాలనే కంపెనీ యొక్క broader strategyతో అవి సరిపోతాయి.

Sensor vendor నుంచి platform supplierగా
source textలో మరింత వెల్లడించేది color claim కాదు, దాని వెనుక ఉన్న business context. Ouster ఇటీవల StereoLabsను $38 millionకు acquire చేసింది, దీనిని Pacala systems లేదా platform business నిర్మాణంలో భాగమని వివరించారు. ఇది robotics marketలో పెద్ద మార్పును సూచిస్తోంది. కంపెనీలు ఇప్పుడు విడివిడిగా hardware blocks అమ్మడంలో కాకుండా, integration burdenను తగ్గించే perception solutionsను ఎక్కువగా కోరుతున్నాయి.
ఇది ముఖ్యంగా అనేక కంపెనీలు ఇప్పుడు physical AI అని పిలుస్తున్న సందర్భంలో ప్రాసంగికం: commercial scaleలో real environmentsలో perceive, reason, act చేయాల్సిన systems. ఆ సందర్భంలో customers, cameras లేదా lidar తాత్వికంగా ఏది మెరుగో అనే వాదనలో ఆసక్తి చూపరు. వారు పని చేసే perception stacksను కోరుకుంటారు. Ouster యొక్క framing కూడా అదే pragmatismను చూపిస్తుంది. cameras మరియు lidarsను పరస్పర విరుద్ధాలుగా చూడకూడదని, సరైన ప్రశ్న ఏ పని కోసం ఏ sensor సరిపోతుందనే అని Pacala అన్నారు.
అందువల్ల Rev8 ఒక product launch మాత్రమే కాకుండా ఒక positioning statement కూడా. lidar తన structural advantagesను నిలుపుకుంటూనే మరింత context-awareగా మారవచ్చని Ouster వాదిస్తోంది. deploymentలో ఈ వాదన నిలబడితే, భవిష్యత్ robotic systemsకు narrowly defined components కన్నా integrated sensing platforms అవసరం అనే తమ caseను కంపెనీ బలపరుస్తుంది.
Physical AIలో native color ఎందుకు ముఖ్యం
“Native color lidar” అనే పదం దృష్టిని ఆకర్షిస్తుంది, ఎందుకంటే ఇది robotics perceptionలోని ప్రధాన సమస్యలలో ఒకటిని నేరుగా తాకుతుంది: geometryని semantic contextతో ఎలా కలపాలి. Structure ఒక robotకు objects ఎక్కడున్నాయో, ఎంత దూరంలో ఉన్నాయో చెబుతుంది. Color materials, markings, signals, scene elementsను వేరు చేయడంలో సహాయపడుతుంది, ఇవి navigation లేదా manipulationకు ముఖ్యంగా ఉండవచ్చు. ఈ సమాచారాన్ని తర్వాత loosely fuse చేయకుండా, ఒకే వ్యవస్థగా కలిపినప్పుడు perception మెరుగవుతుందని Ouster వాదిస్తోంది.
మొత్తం context కోసం structure మరియు color రెండూ అవసరమని, అందువల్ల Rev8 AI perceptionలో paradigm shift అని కంపెనీ చెబుతోంది. ఇది బలమైన claim అయినప్పటికీ, వ్యూహాత్మకంగా సुसంగతమైనది. warehouses, streets, industrial sites, లేదా mixed human environmentsలో పని చేసే robotsకు obstacle detection మాత్రమే చాలదు. వారికి మెరుగైన world models కావాలి. ఈ modelsకు మరింత సమృద్ధమైన, మరింత tightly aligned dataని అందించే sensors గణనీయమైన ప్రయోజనం ఇవ్వగలవు.
ఇప్పుడు market Rev8ను execution ఆధారంగా అంచనా వేస్తుంది. native color నిజంగా real-world autonomyను మెరుగుపరుస్తుందా, performance gains deployment పరిస్థితుల్లో నిలుస్తాయా, customerలు systemను production at scaleకు సరిపడా reliable మరియు affordableగా భావిస్తారా అన్నవే కీలక ప్రశ్నలు. safety, reliability, manufacturabilityపై మాత్రమే కాక headline specificationsపై కూడా దృష్టి పెట్టి, ఈ ఆందోళనలకు ముందే సమాధానం ఇవ్వడానికి ఈ ప్రకటనను రూపొందించారు.
ఆ దృష్టి సబబే. roboticsలో impressive demo మరియు viable product మధ్య తేడా సాధారణంగా reliability, cost, integration effortలతో నిర్ణయించబడుతుంది. Rev8 ముఖ్యమైనది, ఎందుకంటే కనీసం వాగ్దాన స్థాయిలో ఈ మూడు అంశాలనూ ఇది address చేస్తోంది. ఉత్పత్తి వివరించినట్లే పనిచేస్తే, lidarను specialized perception input నుంచి broader physical AI stackలో మరింత కేంద్ర పాత్రకు తీసుకెళ్లడంలో సహాయపడుతుంది.
- Ouster next-generation L4 siliconతో తన Rev8 OS lidar familyను ప్రారంభించింది.
- పాత generationతో పోలిస్తే up to double range మరియు resolutionతో native-color lidarను అందిస్తున్నామని కంపెనీ చెబుతోంది.
- ఈ platform autonomy, functional safety, మరియు production-scale deployment కోసం స్థానం సంపాదిస్తోంది.
- ఈ launch, component supplier నుంచి perception platform business వైపు Ouster యొక్క broader shiftను బలపరుస్తోంది.
ఈ వ్యాసం The Robot Report నివేదిక ఆధారంగా ఉంది. మూల వ్యాసాన్ని చదవండి.
Originally published on therobotreport.com