La robotique sous-marine repousse l'archéologie maritime toujours plus profond
Un robot téléopéré a cartographié une épave française du XVIe siècle reposant à plus de 1,5 mile sous la surface, selon les métadonnées fournies par le candidat d'Interesting Engineering. Le robot aurait capturé 86 000 images du site et récupéré des artefacts, combinant une documentation visuelle à grande échelle avec une récupération physique dans un environnement bien au-delà de la portée habituelle de la plongée humaine.
Même sous une forme brève, ces éléments montrent la convergence continue entre robotique, imagerie et travail patrimonial. Une épave à cette profondeur est difficile non seulement à atteindre, mais aussi à étudier de manière systématique. Le nombre d'images signalé suggère une campagne de documentation fondée sur la densité et la précision plutôt que sur une simple inspection rapide. En pratique, c'est ce qui permet à l'exploration sous-marine de passer de la simple découverte à la reconstitution et à l'analyse.
Pourquoi le nombre d'images compte
Le chiffre de 86 000 images est notable en soi. L'imagerie à grand volume est l'un des fondements de la prospection à distance moderne, car elle peut fournir un enregistrement beaucoup plus complet d'un site que la photographie sélective. Pour les archéologues et les équipes de conservation, une archive visuelle détaillée peut être aussi importante que les objets récupérés eux-mêmes. Elle préserve la disposition, le contexte et l'état de conservation d'une manière que des artefacts isolés ne peuvent pas offrir.
Cela devient particulièrement important dans le cas d'une épave du XVIe siècle. Les sites maritimes de cette époque sont des capsules temporelles du commerce, de la technologie, de la guerre et de la vie quotidienne. Plus un site est documenté en profondeur avant toute perturbation, meilleures sont les chances de comprendre non seulement ce qui a été trouvé, mais aussi comment l'épave s'est déposée et ce que ses matériaux peuvent révéler.
La robotique élargit l'accès là où les plongeurs ne peuvent pas aller
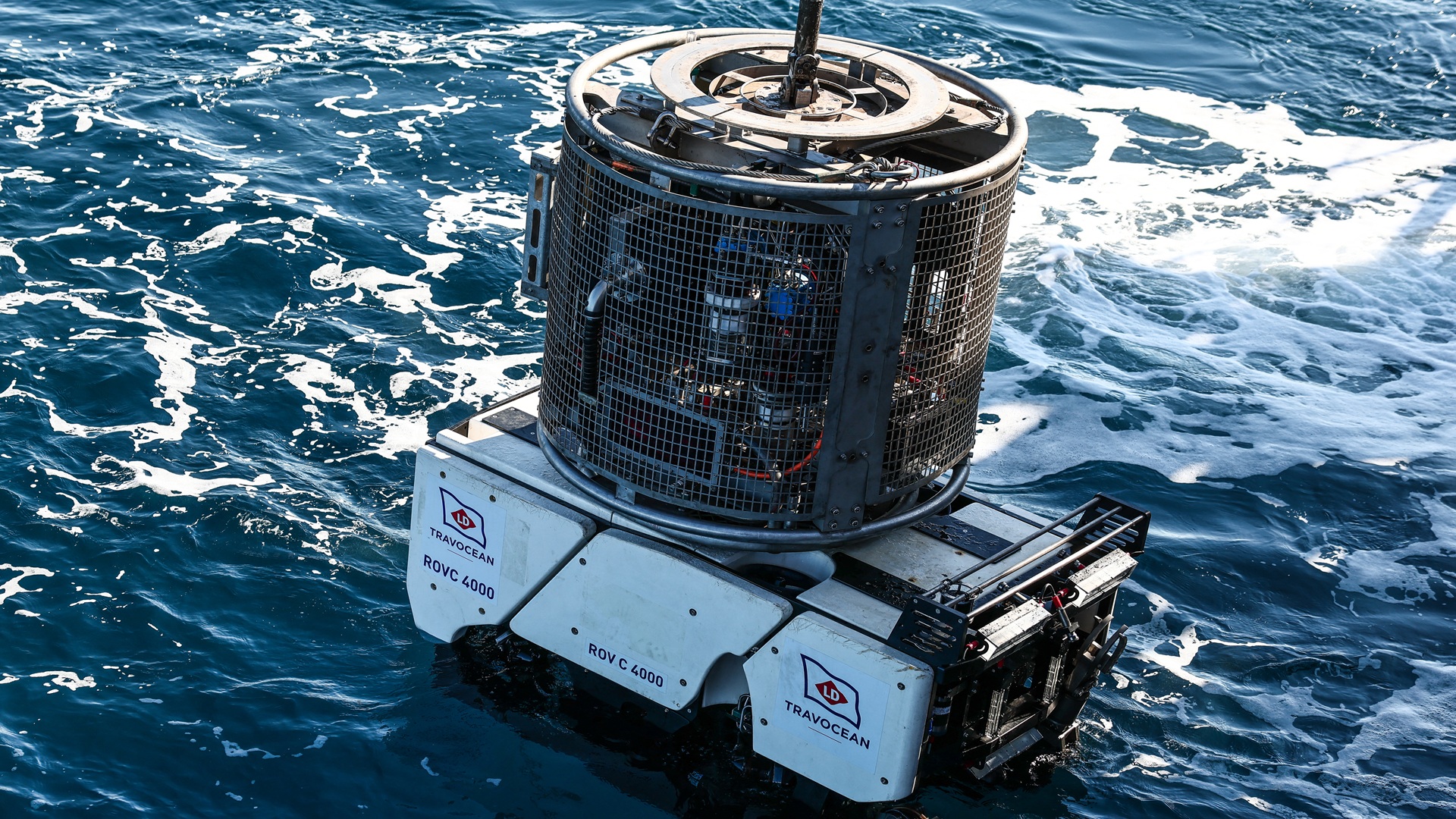
La profondeur mentionnée dans le résumé du candidat, plus de 1,5 mile, suffit à faire de cette opération autant une histoire de robotique qu'une histoire d'archéologie. Les plongeurs humains ne peuvent pas travailler dans de telles conditions. Cela laisse aux systèmes téléopérés ou autonomes la tâche d'assurer l'observation, la navigation et la récupération. En ce sens, chaque campagne réussie d'exploration des grands fonds de ce type élargit le champ d'action des plateformes robotiques, plutôt que de produire seulement une nouvelle série d'images scientifiques.
L'utilisation d'un robot téléopéré reflète aussi un modèle opérationnel plus large, de plus en plus courant dans les environnements extrêmes. Au lieu d'envoyer des personnes dans la zone de danger, les équipes conçoivent des systèmes de détection, de commande et de manipulation capables de fonctionner en profondeur pendant que les experts analysent le flux de données envoyé depuis la surface. Cette approche réduit le risque et augmente l'endurance, deux raisons majeures pour lesquelles la robotique sous-marine continue de se diffuser dans la science, les infrastructures et l'exploration.
Artefacts et contexte
Le résumé du rapport indique également que le robot a récupéré des artefacts de l'épave. Toute récupération soulève toujours deux questions parallèles: quels objets ont été remontés et quelles informations contextuelles ont été préservées au cours du processus. Comme l'extrait source fourni est limité, le point confirmé essentiel est simplement que la mission combinait cartographie et récupération. Cette combinaison est déjà significative. Elle signifie que l'opération ne se limitait pas à une reconnaissance visuelle et qu'elle pouvait interagir directement avec le site.
Pour les observateurs de l'innovation, cette interaction directe est le signal technique important. Les systèmes d'imagerie aident à construire la compréhension, mais la récupération exige un autre niveau de précision. Saisir, soulever et transporter des objets depuis des profondeurs extrêmes sans les endommager est une tâche exigeante, surtout lorsque les matériaux sont fragiles et historiquement importants.
Un modèle pour les futures missions en environnement extrême
De telles histoires rappellent que l'innovation ne se produit pas uniquement dans les laboratoires et les centres de données. Elle se produit aussi dans des lieux où l'accès lui-même est le problème. Un robot capable de documenter en détail une épave vieille de plusieurs siècles et de récupérer des artefacts à plus de 1,5 mile sous l'eau représente à la fois une avancée en mobilité, en détection et en manipulation à distance.
Cela compte au-delà de l'histoire maritime. Les mêmes familles techniques qui permettent le travail archéologique en grande profondeur alimentent souvent l'inspection industrielle, les opérations énergétiques sous-marines, la surveillance environnementale et d'autres missions où l'accès humain est difficile. La charge utile spécifique de cette mission est peut-être historique, mais la logique de la plateforme est contemporaine et largement pertinente.
Au minimum, le candidat décrit une mission qui a accompli trois choses à la fois: accès à une profondeur extrême, capture massive d'images et récupération d'artefacts. Cela suffit pour en faire une étape marquante de la robotique, et un exemple utile de la manière dont les systèmes téléopérés élargissent ce qui peut être exploré, enregistré et physiquement récupéré dans certains des environnements les plus difficiles d'accès de la planète.
Cet article est basé sur un reportage d'Interesting Engineering. Lire l'article original.
Originally published on interestingengineering.com