Le Défi de l'Ingénierie de se Mouvoir comme un Humain
Les muscles humains ne fonctionnent pas isolément. Chaque mouvement implique des dizaines de muscles se coordonnant dans des séquences précises, chaque muscle contribuant des profils de force différents à différents points d'un mouvement. Cette approche distribuée et coordonnée du mouvement est ce qui donne au mouvement humain et animal sa qualité fluide et adaptative — et c'est ce qui a rendu la réplication de ce mouvement dans les machines si difficile.
L'actuation robotique traditionnelle s'appuie sur des moteurs et des servos qui produisent le mouvement à partir d'unités d'entraînement discrètes et centralisées. Ces systèmes excellent pour les tâches industrielles précises et répétitives, mais ils produisent un mouvement qui semble mécanique précisément parce que c'est le cas : quelques moteurs font le travail plutôt qu'un réseau distribué de nombreux actionneurs travaillant ensemble.
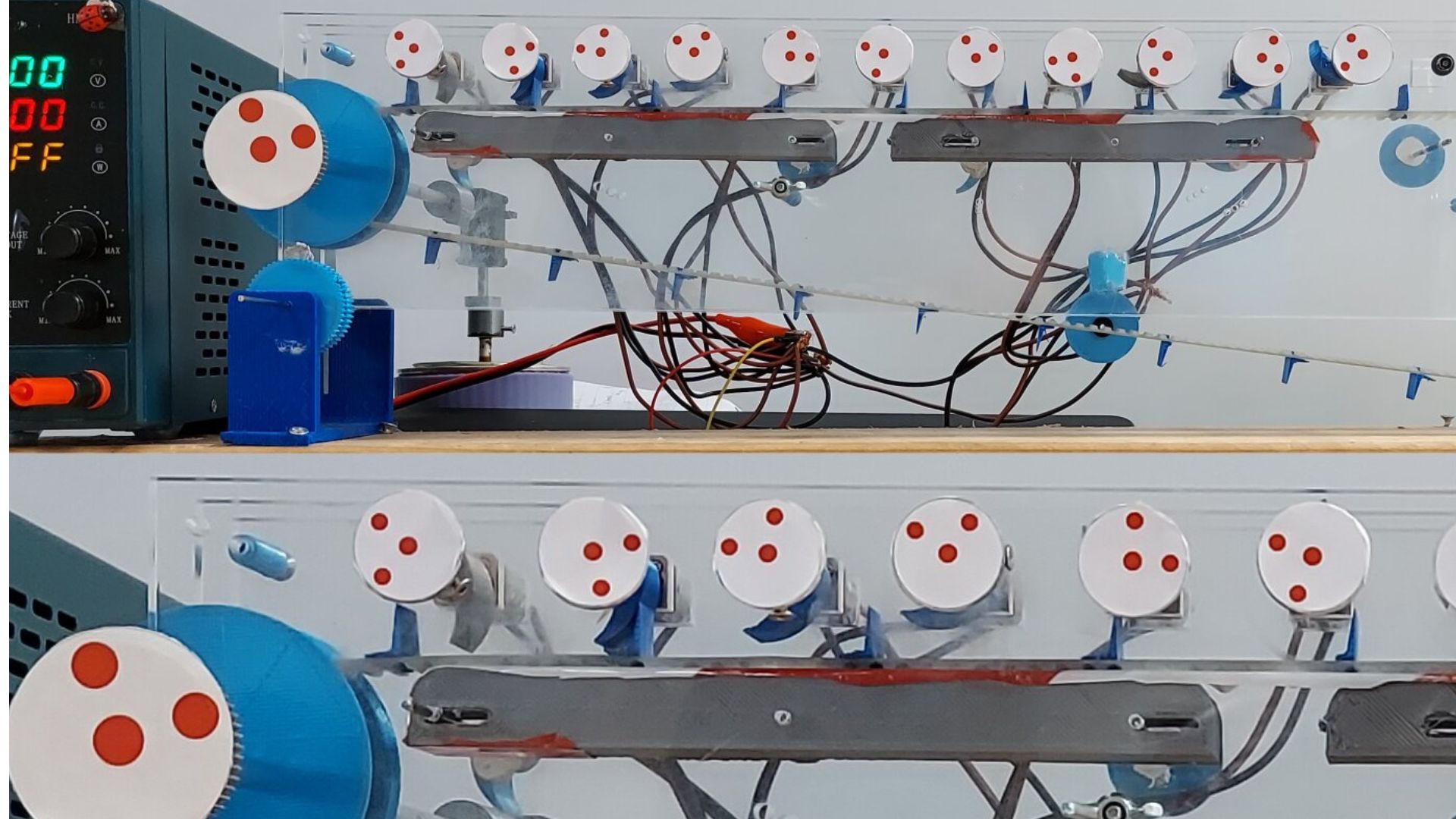
Des chercheurs de l'Université de Bristol ont adopté une approche différente. Leur système de moteurs artificiels consiste en un réseau de moteurs mécaniques simples dont le comportement collectif émerge de leurs interactions plutôt que du contrôle centralisé. Le résultat est un mouvement qui imite étroitement la dynamique distribuée des systèmes musculaires biologiques.
Comment Fonctionne le Système
Le réseau de moteurs de Bristol est construit autour d'actionneurs individuels relativement simples — similaires en principe aux unités motrices qui composent les muscles biologiques. Chaque actionneur individuel est limité dans ses capacités, mais lorsqu'ils sont interconnectés en réseau, le système dans son ensemble produit des comportements qu'aucun actionneur individuel ne pourrait générer.
Ceci reflète l'architecture du muscle biologique. Une fibre musculaire humaine peut se contracter ou se relâcher, mais la sortie de force graduée et le mouvement fluide que nous expérimentons proviennent du recrutement de différents nombres de fibres à différents moments. Le système de Bristol applique ce principe à des actionneurs mécaniques, utilisant les interactions du réseau plutôt que des unités individuelles complexes pour produire des comportements collectifs sophistiqués.
Plutôt que de programmer des trajectoires précises et des profils de force de manière centralisée, les contrôleurs peuvent émettre des commandes de haut niveau et laisser la dynamique du réseau gérer les détails de coordination. Ceci est plus robuste aux charges inattendues et aux variations environnementales que les approches de contrôle traditionnelles.

Applications en Robotique Souple
La robotique souple — des robots faits de matériaux conformables plutôt que de structures rigides — est devenue l'un des domaines les plus actifs de la recherche en robotique. Les robots souples peuvent interagir de manière plus sûre avec les humains, naviguer dans des espaces étroits ou irréguliers et manipuler des objets délicats sans le risque des manipulateurs rigides.
Le défi pour la robotique souple a été l'actuation. La plupart des systèmes d'actionneurs souples sont difficiles à contrôler précisément et tendent à produire des mouvements relativement lents et limités. Un réseau de moteurs artificiels capable de coordonner de nombreux actionneurs pour des mouvements plus dynamiques et naturels pourrait considérablement élargir ce que les robots souples peuvent faire.
Prothèses et Appareils Portables
L'une des zones d'application les plus immédiates est les prothèses. Les prothèses actuelles, même les conceptions myoélectriques avancées, semblent souvent mécaniques d'une manière qui frustre les utilisateurs. Une prothèse construite selon les principes du réseau de moteurs artificiels pourrait produire des dynamiques de mouvement plus naturelles et s'adapter plus flexiblement aux charges et contextes de la vie quotidienne.
La nature distribuée du contrôle offre également des avantages potentiels en matière de robustesse — si des unités d'actionneurs individuels échouent, le réseau peut compenser, plutôt que le membre entier perdant sa fonction. Les appareils portables de réadaptation qui assistent le mouvement humain représentent une autre application à court terme, en particulier pour la récupération après accident vasculaire cérébral et l'assistance à la mobilité.

Le Chemin vers le Déploiement
La recherche de Bristol en est à un stade précoce — démontrant le principe et caractérisant le comportement du système plutôt que de produire des dispositifs déployables. Le chemin de la démonstration en laboratoire aux prothèses commerciales ou aux appareils portables de réadaptation implique une ingénierie substantielle, une approbation réglementaire et une validation clinique.
Mais le concept sous-jacent — appliquer les principes biologiques de coordination musculaire distribuée à des systèmes mécaniques — est assez convaincant pour que plusieurs groupes de recherche et entreprises de dispositifs médicaux le poursuivent probablement. Si les robots souples avec réseaux de moteurs artificiels peuvent finalement se déplacer avec quelque chose qui s'approche de la naturel des membres biologiques, la gamme de tâches qu'ils peuvent accomplir aux côtés des humains s'étendra considérablement.
Cet article est basé sur des reportages de Interesting Engineering. Lisez l'article original.
Originally published on interestingengineering.com