Une chaîne d’entraînement compacte conçue pour les contraintes des entrepôts et des convoyeurs
FAULHABER a présenté un nouveau système d’entraînement baptisé DualGear, conçu pour les convoyeurs et les entraînements de roues compacts dans les systèmes de logistique autonome. Selon le matériel source, le produit vise des applications où l’espace d’installation est limité, mais où la performance, la durabilité et la précision du contrôle restent essentielles.
Ce positionnement reflète les contraintes bien réelles de l’intralogistique moderne. Les entrepôts, les centres de préparation de commandes et les environnements automatisés de manutention exigent davantage de contrôle de mouvement dans des encombrements toujours plus réduits. À mesure que les systèmes robotiques se multiplient, de petites améliorations de l’intégration et de l’emballage peuvent compter autant que la performance brute du composant.
Deux mouvements synchronisés à partir d’un seul entraînement
L’argument central de DualGear est qu’il peut fournir deux mouvements synchronisés avec un seul entraînement. FAULHABER indique que cette conception réduit l’effort d’intégration tout en diminuant l’espace d’installation et les coûts du système. Dans les environnements où les concepteurs arbitrent entre débit, accessibilité pour la maintenance et géométrie compacte du véhicule, cette proposition est simple et commercialement attrayante.
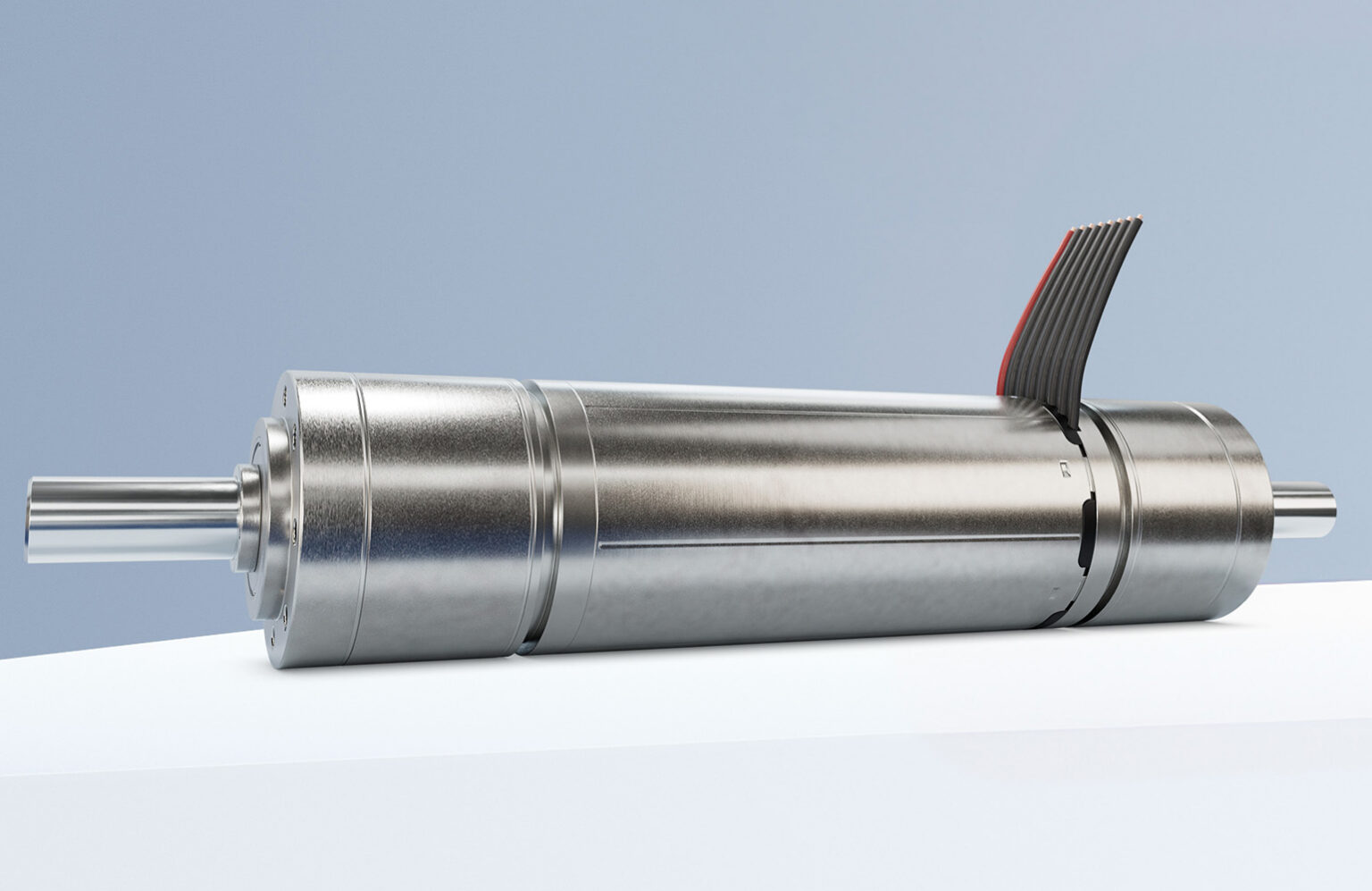
La source décrit l’unité comme une combinaison d’un moteur sans balais de 32 mm de la famille BX4 de FAULHABER et de réducteurs planétaires métalliques de la série GPT montés aux deux extrémités du moteur. Le moteur de base est proposé en longueurs de 42 mm et 68 mm, ce qui permet de l’adapter à différents besoins de performance et d’intégration.
Ces détails importent car les acheteurs de solutions d’automatisation ne sélectionnent pas seulement une densité de puissance. Ils évaluent aussi la facilité avec laquelle un composant s’intègre dans une architecture de machine plus vaste. Un système d’entraînement qui regroupe des fonctions de mouvement peut simplifier les choix de conception pour les OEM qui construisent des plateformes autonomes compactes ou des modules de convoyage denses.

La précision reste un argument clé
FAULHABER met également l’accent sur la précision du contrôle. La source indique que des capteurs Hall avec signaux de sortie sinusoïdaux permettent une détection précise de la position du rotor pour la commutation et le positionnement. Associé à un contrôleur de mouvement externe, cet ensemble prend en charge un positionnement précis dans un format compact.
Cet accent sur la précision est important pour l’automatisation logistique, car de nombreuses tâches d’entrepôt exigent désormais plus qu’un roulement continu. Le tri, l’alignement des transferts, l’accostage et le comportement coordonné des convoyeurs bénéficient tous d’un positionnement prévisible et reproductible. Un entraînement compact capable d’offrir à la fois du couple et de la précision s’inscrit dans la direction prise par l’automatisation industrielle, où même les petits systèmes mobiles et embarqués doivent se comporter de manière plus intelligente.
La modularité du système semble également faire partie de son attrait. Selon la source, les réducteurs planétaires GPT peuvent être configurés avec jusqu’à trois étages, ce qui permet d’ajuster vitesse et couple plus précisément. Ce type de configurabilité est typique des composants industriels sérieux, mais il reste un différenciateur crucial sur les marchés de la robotique, où une solution standardisée ne convient souvent pas à des profils de déploiement variés.
Pourquoi le lancement d’un composant compte encore dans la couverture robotique
À première vue, le lancement d’une chaîne d’entraînement peut sembler plus étroit qu’une annonce logicielle ou qu’un titre sur les robots humanoïdes. Mais l’automatisation des entrepôts ne fonctionne pas sur les gros titres seuls. Elle repose sur des composants capables de tenir de longs cycles de service, de s’insérer dans des enveloppes mécaniques contraintes et de réduire la complexité globale du système. Des produits comme DualGear occupent cette couche de la pile.
La source note aussi que les composants ne sont reliés que par des jonctions soudées et non par des adhésifs, un choix de conception que l’entreprise dit plus fiable et plus durable. Ce détail renvoie aux conditions réelles d’exploitation auxquelles ces systèmes sont confrontés. Dans les environnements logistiques, la disponibilité compte plus que la nouveauté. Les composants sont jugés sur leur capacité à fonctionner longtemps avec des performances prévisibles et des besoins de maintenance maîtrisables.
Pour la robotique et la logistique autonome, cela importe parce que l’échelle de déploiement dépend de plus en plus de la maturité technique plutôt que de l’enthousiasme d’une preuve de concept. Une flotte de robots n’est utile que par la fiabilité de ses systèmes de mouvement, de ses capteurs, de ses contrôleurs et de ses composants d’alimentation. Les fournisseurs capables de réduire l’encombrement, de diminuer l’effort d’assemblage et de maintenir la précision gagnent en levier à mesure que les programmes d’automatisation passent des pilotes à l’infrastructure.
Un indicateur de la direction prise par l’automatisation logistique
DualGear doit donc être compris non pas comme une rupture spectaculaire isolée, mais comme un indicateur des priorités au niveau système dans la robotique industrielle. Les concepteurs veulent de la compacité, de la flexibilité, de la précision et moins de pièces à intégrer. Ils veulent aussi des composants adaptés aux contraintes réelles des entrepôts plutôt que des offres génériques de catalogue moteur.
À mesure que la logistique autonome se développe, une part croissante de l’avantage concurrentiel pourrait venir de ces sous-systèmes habilitants. Le récit public du secteur se concentre souvent sur les robots visibles. La course plus discrète se joue dans les composants qui rendent ces machines plus petites, moins coûteuses et plus fiables.
Cet article s’appuie sur un reportage de The Robot Report. Lire l’article original.
Originally published on therobotreport.com




