Les entreprises de robotique regardent au-delà de la vision brute pour aller vers une compréhension spatiale plus profonde
Brain Corp et l’Université de Californie à San Diego élargissent leur collaboration de recherche afin d’améliorer la manière dont les robots autonomes comprennent des environnements complexes. Les travaux sont centrés sur la cartographie sémantique et sur ce que les partenaires décrivent comme une « couche d’ancrage contextuel », une représentation numérique des espaces physiques destinée à aider les robots à interpréter leur environnement de manière plus fiable dans des contextes commerciaux et industriels.
L’annonce intervient alors que les développeurs en robotique se précipitent pour intégrer des systèmes de vision-langage-action et d’autres systèmes d’IA générative dans des machines du monde réel. Ces modèles ont élargi ce que les robots peuvent déduire des images et du langage, mais la question centrale est de savoir s’ils peuvent le faire avec assez de constance et de résilience pour être déployés dans des environnements animés et imprévisibles.
Pourquoi Brain Corp et l’UC San Diego pensent que les cartes restent essentielles
Selon la source fournie, la collaboration estime que les cartes sémantiques 3D contextuelles restent indispensables, même si le secteur explore des systèmes d’IA opérant plus directement à partir de données visuelles. Autrement dit, une perception plus riche n’élimine pas le besoin d’une compréhension spatiale structurée. Elle peut au contraire rendre ce besoin plus pressant.
C’est une position importante dans un domaine de plus en plus enthousiasmé par l’IA de bout en bout. Si le partenariat a raison, la voie vers une autonomie pratique dépendra non seulement de modèles plus grands, mais aussi de modèles du monde robustes qui indiquent aux machines ce que sont les objets, où ils se trouvent et comment ils se rapportent aux tâches qu’un robot tente d’exécuter.
Du SLAM à la conscience de situation
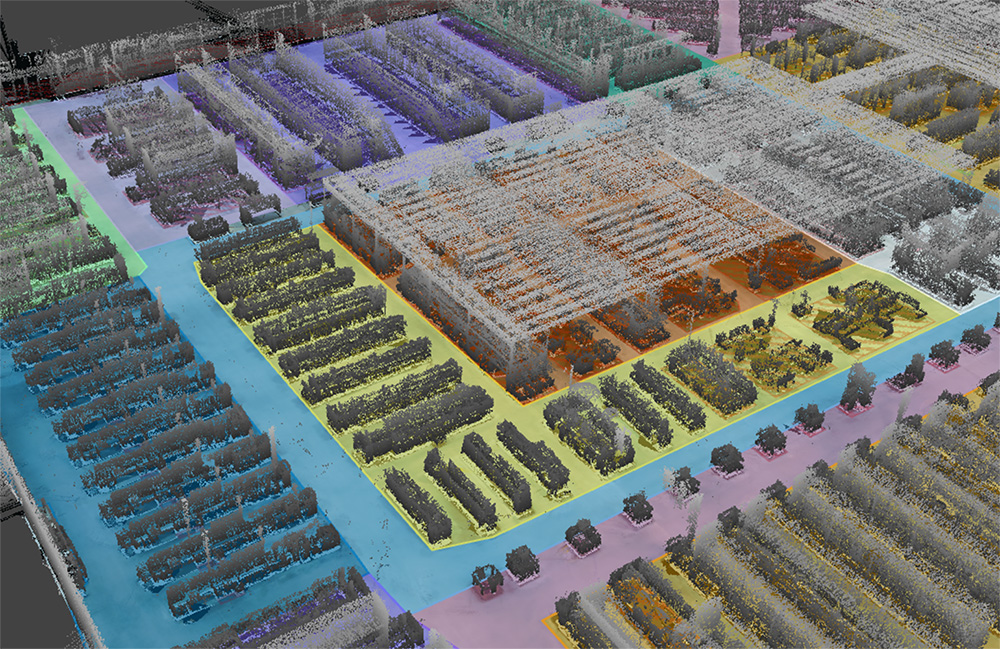
La localisation et cartographie simultanées, ou SLAM, ont permis aux robots de quitter les cellules industrielles fixes pour entrer dans des espaces dynamiques en leur permettant de construire et de mettre à jour des cartes tout en naviguant. L’étape suivante, telle que la présentent les partenaires, consiste à donner à ces cartes davantage de profondeur sémantique et contextuelle. Cela signifie aller au-delà de la géométrie vers la compréhension : pas seulement un couloir, mais un couloir avec des personnes, des obstacles, des flux de travail et des règles opérationnelles changeantes.
La source décrit la couche d’ancrage contextuel comme une représentation numérique intelligente qui pourrait soutenir les robots, les drones et les véhicules autonomes. Le bénéfice annoncé est une conscience de situation suffisamment forte pour permettre à des systèmes d’IA avancés de réagir de manière intuitive et sûre dans des environnements physiques partagés avec des humains.
Le problème commercial derrière la recherche
L’intérêt de cette direction est pratique. De nombreux échecs en robotique ne surviennent pas parce qu’un système ne peut pas reconnaître un objet en laboratoire, mais parce que les espaces réels sont désordonnés, reconfigurables et socialement complexes. Les étagères bougent, des chariots apparaissent, des personnes interrompent les flux, et les conditions d’éclairage changent. Un robot capable de classer des images mais incapable d’ancrer ces informations dans un contexte spatial durable est plus difficile à faire confiance.
L’empreinte opérationnelle de Brain Corp donne au projet un véritable terrain de déploiement. La source cite plus de 50 000 robots déployés dans le monde, ce qui signifie que l’entreprise travaille à partir d’une base installée plutôt qu’à partir de seuls prototypes de recherche. Cela compte, car cela suggère que le partenariat vise une autonomie commercialement pertinente, et pas seulement des évaluations académiques.
Une voie médiane pour l’IA physique
La collaboration reflète également un changement plus large dans la stratégie robotique. Le secteur recherche de plus en plus une voie médiane entre l’automatisation fragile et spécifique à une tâche et une IA généraliste trop ambitieuse. La cartographie contextuelle est une candidate pour cette couche intermédiaire. Elle peut préserver la structure et la sécurité tout en permettant un comportement plus souple au-dessus.
Que cette approche devienne fondamentale dépendra de son exécution, en particulier de la manière dont ces cartes plus riches évolueront, se mettront à jour et s’intégreront à des modèles d’IA en rapide évolution. Mais l’idée centrale est solide : en robotique, l’intelligence ne consiste pas seulement à voir. Elle consiste à ancrer la perception dans un modèle stable du monde. Brain Corp et l’UC San Diego parient que cette couche, plutôt que la seule taille brute du modèle, pourrait être ce qui rendra la prochaine génération de systèmes autonomes déployable hors des environnements contrôlés.
Cet article s’appuie sur un reportage du The Robot Report. Lire l’article original.
Originally published on therobotreport.com