تحدي الهندسة للتحرك مثل الإنسان
العضلات البشرية لا تعمل بمعزل عن بعضها. كل حركة تتضمن عشرات العضلات التي تتنسق في تسلسلات دقيقة، مع مساهمة العضلات الفردية بملفات قوة مختلفة في نقاط مختلفة من الحركة. هذا النهج الموزع والمنسق للحركة هو ما يعطي الحركة البشرية والحيوانية صفتها السلسة والمتكيفة — وهو ما جعل تكرار تلك الحركة في الآلات أمراً صعباً جداً.
التحريك الروبوتي التقليدي يعتمد على محركات وخدمات بيانات تنتج حركة من وحدات محرك منفصلة وموحدة. هذه الأنظمة ممتازة للمهام الصناعية الدقيقة والمتكررة، لكنها تنتج حركة تبدو ميكانيكية لأنها كذلك فعلاً: عدد قليل من المحركات تؤدي العمل بدلاً من شبكة موزعة من العديد من المشغلات التي تعمل معاً.
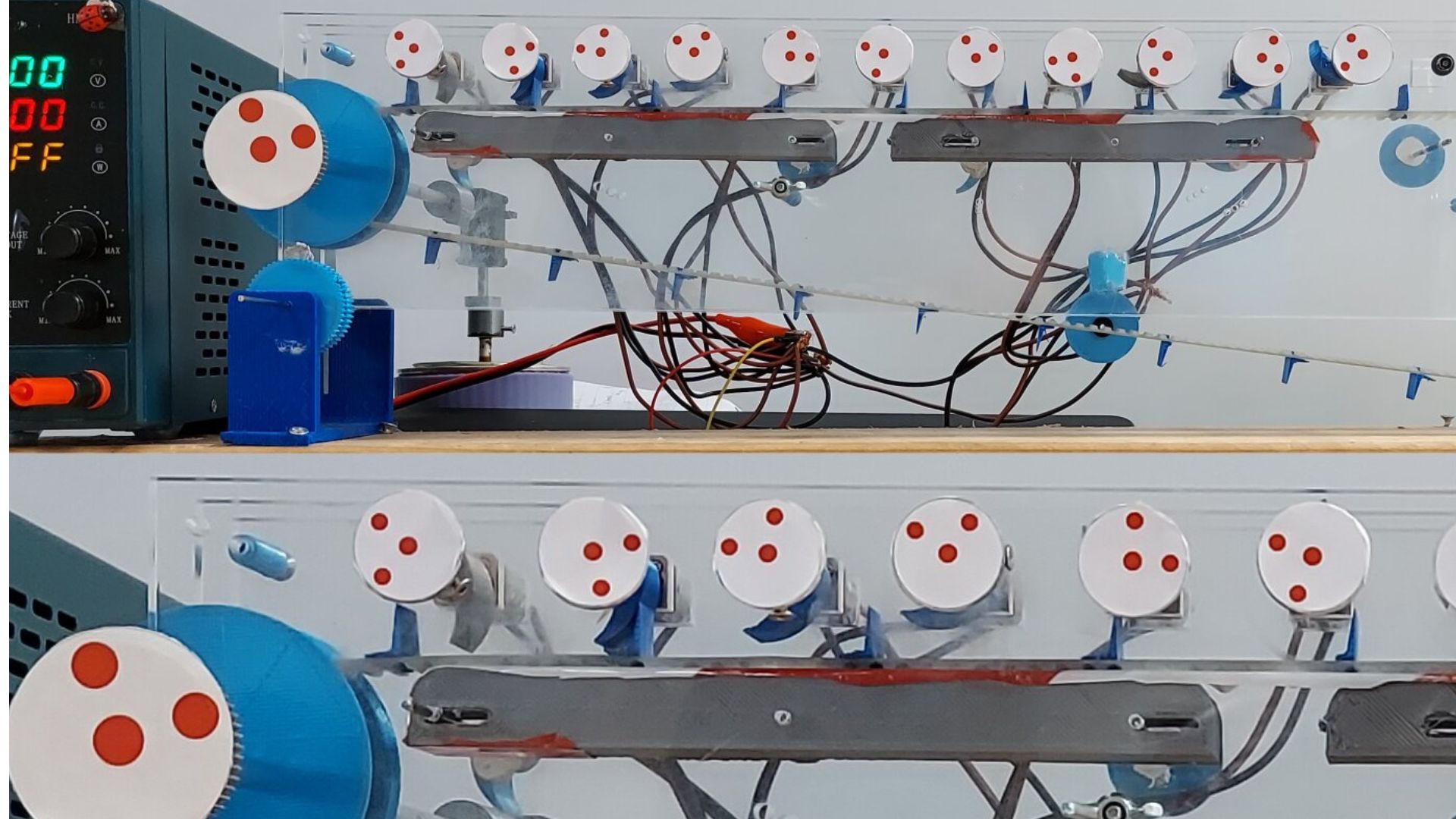
اتخذ باحثون في جامعة بريستول نهجاً مختلفاً. يتكون نظام محركاتهم الاصطناعي من شبكة من المحركات الميكانيكية البسيطة نسبياً التي ينبثق سلوكها الجماعي من تفاعلاتها بدلاً من التحكم الموحد. والنتيجة هي حركة تحاكي عن كثب الديناميكية الموزعة لأنظمة العضلات البيولوجية.
كيفية عمل النظام
تُبنى شبكة محركات بريستول حول مشغلات فردية بسيطة نسبياً — مشابهة من حيث المبدأ لوحدات المحرك التي تشكل العضلات البيولوجية. كل مشغل فردي محدود في قدراته، لكن عندما يتم توصيله بشبكة، ينتج النظام ككل سلوكيات لا يستطيع أي مشغل فردي توليدها.
هذا يعكس بنية العضلة البيولوجية. يمكن لألياف العضلات البشرية أن تنقبض أو تسترخي، لكن إخراج القوة المتدرجة والحركة السلسة التي نختبرها تأتي من تجنيد أعداد مختلفة من الألياف في أوقات مختلفة. يطبق نظام بريستول هذا المبدأ على المشغلات الميكانيكية، باستخدام تفاعلات الشبكة بدلاً من الوحدات الفردية المعقدة لإنتاج سلوكيات جماعية متطورة.
بدلاً من برمجة المسارات الدقيقة وملفات القوة بشكل موحد، يمكن للمتحكمات إصدار أوامر على مستوى أعلى والسماح لديناميكية الشبكة بالتعامل مع تفاصيل التنسيق. هذا أكثر قوة في مواجهة الأحمال غير المتوقعة والاختلافات البيئية من أساليب التحكم التقليدية.

التطبيقات في الروبوتات الناعمة
الروبوتات الناعمة — الروبوتات المصنوعة من مواد متوافقة بدلاً من الهياكل الصلبة — ظهرت كواحدة من أكثر مجالات أبحاث الروبوتات نشاطاً. يمكن للروبوتات الناعمة أن تتفاعل بشكل أكثر أماناً مع البشر، والتنقل عبر مساحات ضيقة أو غير منتظمة، والتعامل مع الأشياء الحساسة بدون خطر المعالجات الصلبة.
كان التحدي للروبوتات الناعمة هو التحريك. معظم أنظمة المشغلات الناعمة يصعب التحكم فيها بدقة وتميل إلى إنتاج حركات بطيئة نسبياً ومحدودة. شبكة محركات اصطناعية يمكنها تنسيق العديد من المشغلات لحركات أكثر ديناميكية وطبيعية يمكن أن توسع بشكل كبير ما يمكن للروبوتات الناعمة القيام به.
الأطراف الصناعية والأجهزة القابلة للارتداء
أحد أكثر مجالات التطبيق الفورية هو الأطراف الصناعية. غالباً ما تشعر الأطراف الصناعية الحالية، حتى التصاميم الكهربائية المتقدمة، بأنها ميكانيكية بطرق تحبط المستخدمين. طرف صناعي مبني على مبادئ شبكة المحركات الاصطناعية يمكن أن ينتج ديناميكيات حركة أكثر طبيعية ويتكيف بمرونة أكبر مع أحمال وسياقات الحياة اليومية.
تقدم الطبيعة الموزعة للتحكم أيضاً مزايا محتملة من حيث المتانة — إذا فشلت وحدات المشغلات الفردية، يمكن للشبكة التعويض، بدلاً من فقدان الطرف الكامل للوظيفة. تمثل الأجهزة القابلة للارتداء لإعادة التأهيل التي تساعد الحركة البشرية تطبيقاً قريب الأجل آخر، خاصة لاستشفاء السكتة الدماغية والمساعدة في الحركة.
المسار نحو النشر
أبحاث بريستول في مرحلة مبكرة — تُظهر المبدأ وتوصيف سلوك النظام بدلاً من إنتاج أجهزة قابلة للنشر. الطريق من عرض المختبر إلى أطراف صناعية تجارية أو أجهزة قابلة للارتداء لإعادة التأهيل تتطلب هندسة كبيرة وموافقة تنظيمية والتحقق السريري.
لكن المفهوم الأساسي — تطبيق مبادئ تنسيق العضلات الموزعة البيولوجية على الأنظمة الميكانيكية — مقنع بما يكفي بحيث يرجح أن يسعى عدة مجموعات بحثية وشركات للأجهزة الطبية إليه. إذا تمكنت الروبوتات الناعمة ذات شبكات المحركات الاصطناعية من الحركة في النهاية بشيء يقارب طبيعية الأطراف البيولوجية، فسيتوسع نطاق المهام التي يمكنها تنفيذها جنباً إلى جنب مع البشر بشكل كبير.
تستند هذه المقالة إلى تقارير من Interesting Engineering. اقرأ المقالة الأصلية.
Originally published on interestingengineering.com